Hi everyone !
I have Simucube 1 and i try to use the Velocity Control but I have different problems.
However, with the Torque mode, the motor is fine.
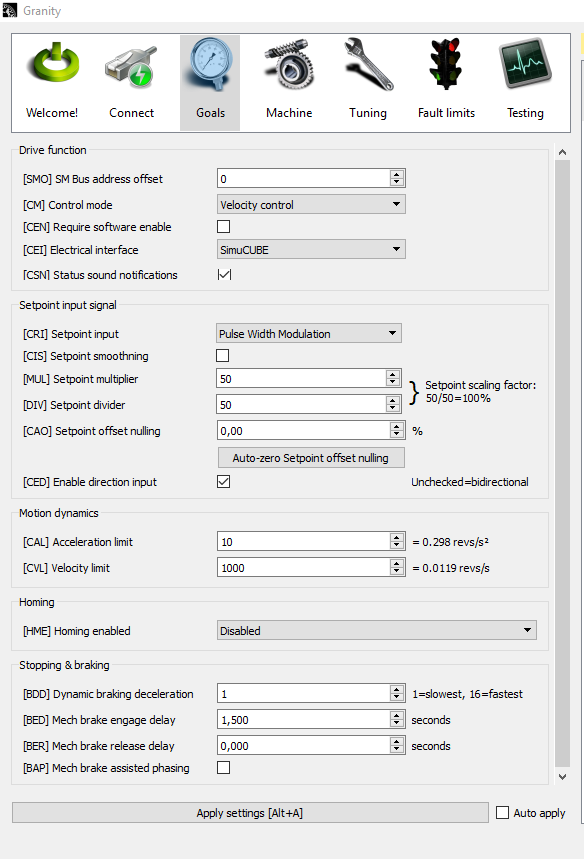
When I try to switch in Velocity Control, my "Mige AM10010"can’t turn. It makes a thud and then goes into error. I tried to change values in Granity but nothing changes. You will find below the configurations:
Do you have a solution ?
In the future, i would like to use a program based on “RealtimeControlExample” delivered with SimpleMotionV2.
Thanks a lot !
Raph
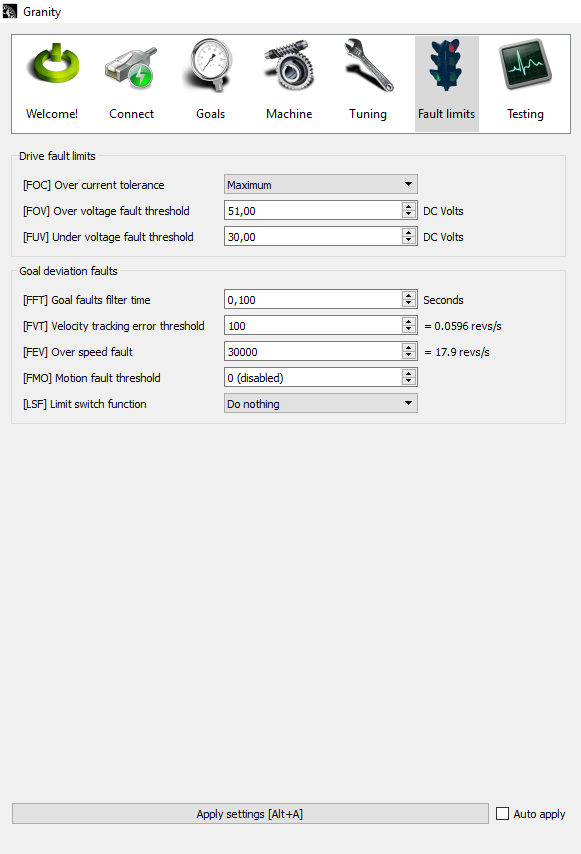
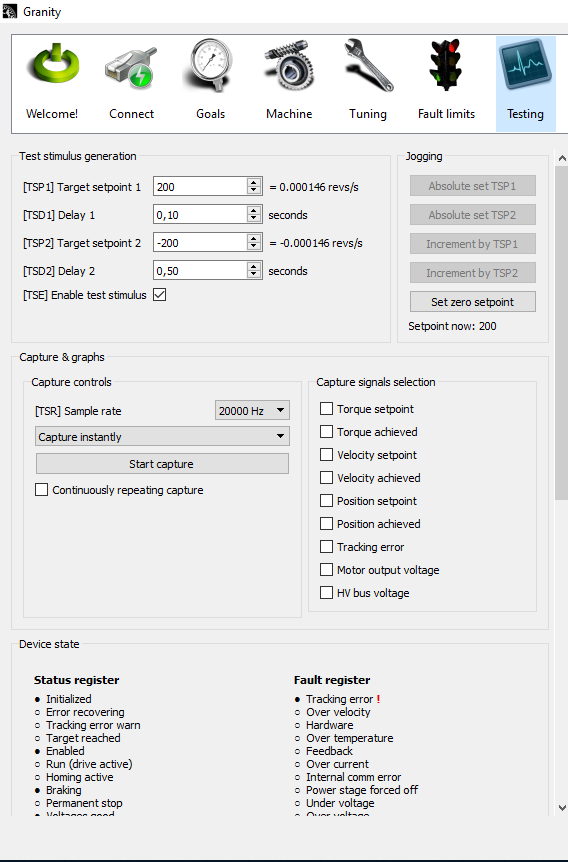
You seem to be getting tracking error. Use more lenient goal deviation faults.
Thanks Mika for your reply.
Even if I change the goal deviation faults, my motor is not longer in default. However, it makes always a thud and the wheel don’t turn.
Do you have values of Goal deviation fault to suggest ?
Thanks,
I haven’t done position tuning myself, so can’t help there.
Hi Raph
When tuning the velocity controller, it’s good practice to put the velocity tracking fault very high, some 50 rps or even more (i.e. max it out). Then it’s possible to tune the motor without getting the error.
Your velocity limit is also very low, 0.0119 rps. Is this intentional?
Kind regards,
Esa
Hi Esa,
Thanks for yout quick reply.
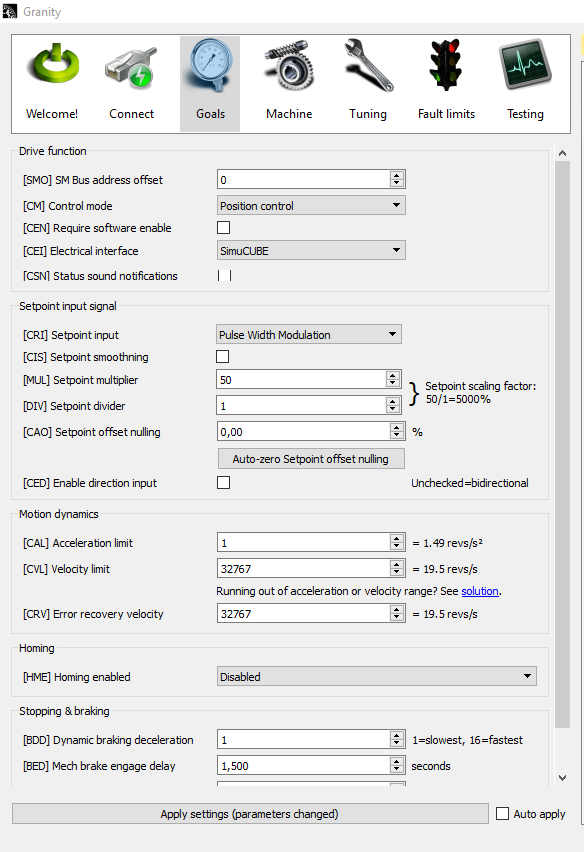
I try with a lot of values of [CVL] Volocity limit, but never change. The max value is 0.391 revs/s (32767).
If I change the “[DIV] Setpoint divider” value, velocity limit increase ->
I increase also the Acceleration limit to 10(14.9 revs/s²) but the problem is always present.
I try to upload a video of the problem.
Thanks,
Raph
After change the torque bandwidth limit to 100 Hz and modify the “Torque notch & peaking filter” the motor turn and stop correctly on setpoint !
Thanks to the Granity Teams !
Raph
Hi Raph
Good to hear that you got your system working!
Kind regards,
Esa