Hi, since today I have the problem when I turn on the Simucube.
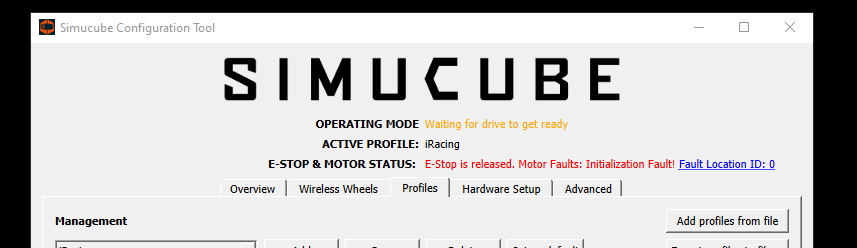
after restart the drive
what can i do?
Hi, since today I have the problem when I turn on the Simucube.
what can i do?
Its an init fault. Can you show us the parameters (there is a button to copy the exact same report as above but it would have included all parameters too) or take screenshots of the other tabs as well.
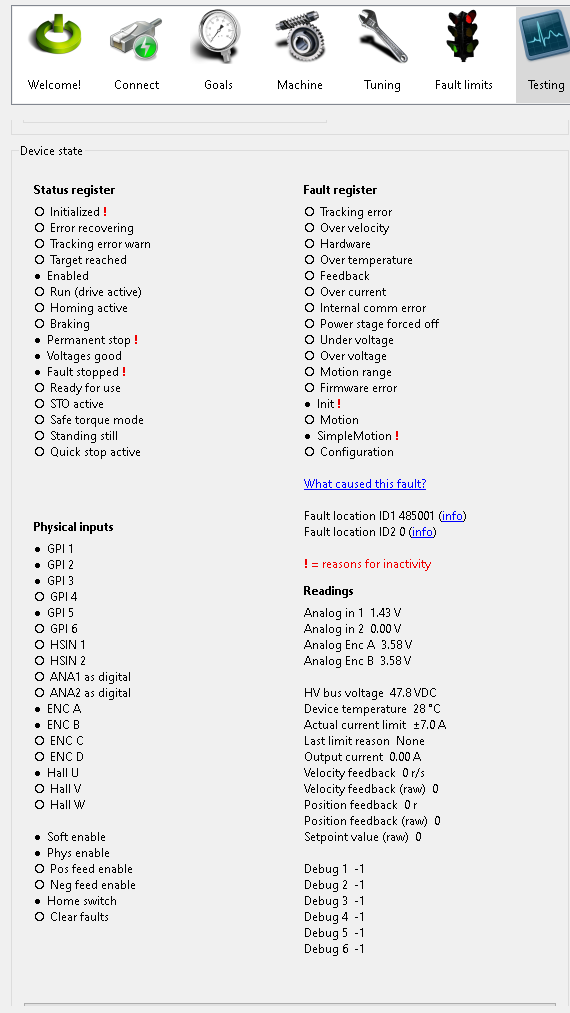
[ ] Initialized !
[ ] Error recovering
[ ] Tracking error warn
[ ] Target reached
[ ] Enabled !
[ ] Run (drive active)
[ ] Homing active
[X] Braking
[ ] Permanent stop
[X] Voltages good
[ ] Fault stopped
[ ] Ready for use
[ ] STO active
[ ] Safe torque mode
[ ] Standing still
[ ] Quick stop active
[ ] Tracking error
[ ] Over velocity
[ ] Hardware
[ ] Over temperature
[ ] Feedback
[ ] Over current
[ ] Internal comm error
[ ] Power stage forced off
[ ] Under voltage
[ ] Over voltage
[ ] Motion range
[ ] Firmware error
[ ] Init
[ ] Motion
[ ] SimpleMotion
[ ] Configuration
What caused this fault?
Fault location ID1 192002 (info)
Fault location ID2 0 (info)
! = reasons for inactivity[X] GPI 1
[X] GPI 2
[X] GPI 3
[ ] GPI 4
[X] GPI 5
[ ] GPI 6
[ ] HSIN 1
[ ] HSIN 2
[ ] ANA1 as digital
[ ] ANA2 as digital
[ ] ENC A
[ ] ENC B
[ ] ENC C
[ ] ENC D
[X] Hall U
[ ] Hall V
[ ] Hall W
[ ] Soft enable !
[X] Phys enable
[ ] Pos feed enable
[ ] Neg feed enable
[X] Home switch
[ ] Clear faults
Analog in 1 1.29 V
Analog in 2 0.00 V
Analog Enc A -3.49 V
Analog Enc B -3.53 V
HV bus voltage 47.9 VDC
Device temperature 24 °C
Actual current limit ±7.0 A
Last limit reason None
Output current 0.21 A
Velocity feedback 0 r/s
Velocity feedback (raw) 0
Position feedback 0 r
Position feedback (raw) 0
Setpoint value (raw) 0
Debug 1 -1
Debug 2 -1
Debug 3 -1
Debug 4 -1
Debug 5 -1
Debug 6 -1
Parameters
| GCFWVER=10720 | HWTYPE=11201 | HWSERIAL=112012621 | BUILDREVISION=3047e45
| CEI=2 | UID=1ed6c9cd | SMO=0 | TRF1=4
| TRF2=0 | TRA1=0 | TRA2=0 | MPP=0
| NOTCHFILT=655616 | TED=1 | TEF=0 | TEI=0
| SERIALENCBITS=6 | COMMUTATIONCFG=0 | HAO=0 | FBR=4096
| FBD=1 | FB2D=0 | TBW=11 | KVP=300
| KVI=30 | KPP=50 | VFF=0 | AFF=0
| PFF=85 | CM=2 | MT=3 | AD=0
| FLAGS=13 | MMC=7 | MCC=7 | FOC=6
| FOV=56 | FUV=20 | FPT=1000 | FVT=100
| FEV=100 | FMO=0 | LSF=0 | LFO=0
| AXS=1 | AXT=3 | FFT=0.1 | TSR=0
| TCH=2.09715e+06 | TTR=1 | TBT=0 | CRI=3
| DIV=50 | PIF=2500 | MUL=50 | CAL=10
| CSD=10 | CVL=1000 | CRV=100 | MR=5.613
| ML=10 | MTC=500 | MPC=8 | MMS=160
| CAO=0 | HOMING=0 | HMV=100 | HMA=10
| HMH=500 | HMT=1 | HHL=0 | HLL=0
| HMF=0 | HSA=0 | HSS=0 | overrideAddr1=0
| overrideAddr2=0 | overrideAddr3=0 | overrideVal1=0 | overrideVal2=0
| overrideVal3=0 | BED=1.5 | BER=0 | BDD=1
| CAPS1=6.29143e+07 | CAPS2=81823
is that correct?
Put MMC to 12.86 A if this is a Small Mige motor.
This might be unsafe, not much margin for the servo drive to do regeneration. Put this to 51.0 V.
it is a Lenze motor.
I have changed the values
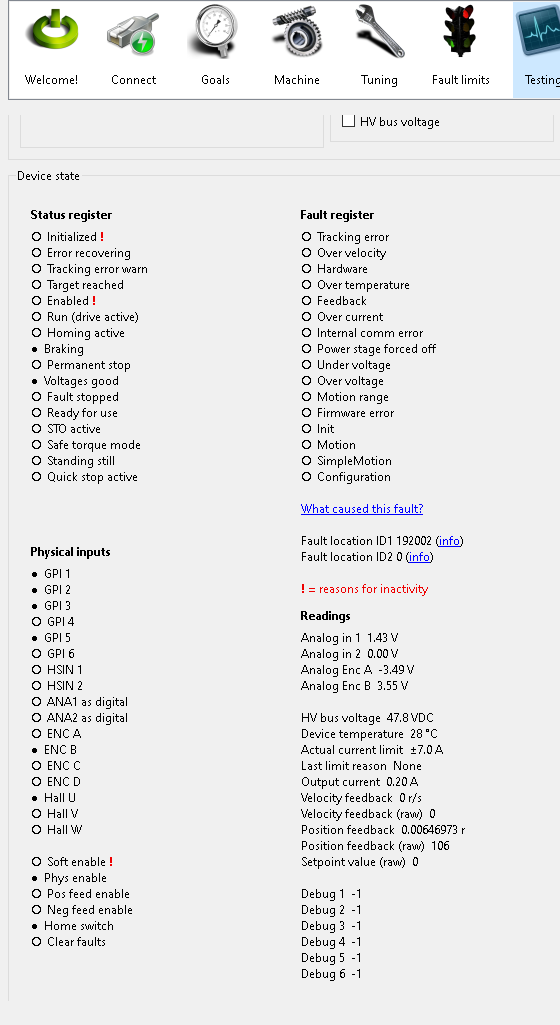
[ ] Initialized !
[ ] Error recovering
[ ] Tracking error warn
[ ] Target reached
[ ] Enabled !
[ ] Run (drive active)
[ ] Homing active
[X] Braking
[ ] Permanent stop
[X] Voltages good
[ ] Fault stopped
[ ] Ready for use
[ ] STO active
[ ] Safe torque mode
[ ] Standing still
[ ] Quick stop active
[ ] Tracking error
[ ] Over velocity
[ ] Hardware
[ ] Over temperature
[ ] Feedback
[ ] Over current
[ ] Internal comm error
[ ] Power stage forced off
[ ] Under voltage
[ ] Over voltage
[ ] Motion range
[ ] Firmware error
[ ] Init
[ ] Motion
[ ] SimpleMotion
[ ] Configuration
What caused this fault?
Fault location ID1 192002 (info)
Fault location ID2 0 (info)
! = reasons for inactivity[X] GPI 1
[X] GPI 2
[X] GPI 3
[ ] GPI 4
[X] GPI 5
[ ] GPI 6
[ ] HSIN 1
[ ] HSIN 2
[ ] ANA1 as digital
[ ] ANA2 as digital
[ ] ENC A
[ ] ENC B
[ ] ENC C
[ ] ENC D
[X] Hall U
[ ] Hall V
[ ] Hall W
[ ] Soft enable !
[X] Phys enable
[ ] Pos feed enable
[ ] Neg feed enable
[X] Home switch
[ ] Clear faults
Analog in 1 1.46 V
Analog in 2 0.00 V
Analog Enc A -3.49 V
Analog Enc B -3.52 V
HV bus voltage 47.9 VDC
Device temperature 30 °C
Actual current limit ±12.9 A
Last limit reason None
Output current 0.20 A
Velocity feedback 0 r/s
Velocity feedback (raw) 0
Position feedback 0 r
Position feedback (raw) 0
Setpoint value (raw) 0
Debug 1 -1
Debug 2 -1
Debug 3 -1
Debug 4 -1
Debug 5 -1
Debug 6 -1
Parameters
| GCFWVER=10720 | HWTYPE=11201 | HWSERIAL=112012621 | BUILDREVISION=3047e45
| CEI=2 | UID=1ed6c9cd | SMO=0 | TRF1=4
| TRF2=0 | TRA1=0 | TRA2=0 | MPP=0
| NOTCHFILT=655616 | TED=1 | TEF=0 | TEI=0
| SERIALENCBITS=6 | COMMUTATIONCFG=0 | HAO=0 | FBR=4096
| FBD=1 | FB2D=0 | TBW=11 | KVP=300
| KVI=30 | KPP=50 | VFF=0 | AFF=0
| PFF=85 | CM=2 | MT=3 | AD=0
| FLAGS=13 | MMC=12.86 | MCC=7 | FOC=6
| FOV=51 | FUV=20 | FPT=1000 | FVT=100
| FEV=100 | FMO=0 | LSF=0 | LFO=0
| AXS=1 | AXT=3 | FFT=0.1 | TSR=0
| TCH=2.09715e+06 | TTR=1 | TBT=0 | CRI=3
| DIV=50 | PIF=2500 | MUL=50 | CAL=10
| CSD=10 | CVL=1000 | CRV=100 | MR=5.613
| ML=10 | MTC=500 | MPC=8 | MMS=160
| CAO=0 | HOMING=0 | HMV=100 | HMA=10
| HMH=500 | HMT=1 | HHL=0 | HLL=0
| HMF=0 | HSA=0 | HSS=0 | overrideAddr1=0
| overrideAddr2=0 | overrideAddr3=0 | overrideVal1=0 | overrideVal2=0
| overrideVal3=0 | BED=1.5 | BER=0 | BDD=1
| CAPS1=6.29143e+07 | CAPS2=81823
The latest Simucube firmware requires you to have “require software enable” function. You can click enable checkbox on the first tab in Granity
ah ok understood
[ ] Initialized !
[ ] Error recovering
[ ] Tracking error warn
[ ] Target reached
[X] Enabled
[ ] Run (drive active)
[ ] Homing active
[ ] Braking
[X] Permanent stop !
[X] Voltages good
[X] Fault stopped !
[ ] Ready for use
[ ] STO active
[ ] Safe torque mode
[ ] Standing still
[ ] Quick stop active
[ ] Tracking error
[ ] Over velocity
[ ] Hardware
[ ] Over temperature
[ ] Feedback
[ ] Over current
[ ] Internal comm error
[ ] Power stage forced off
[ ] Under voltage
[ ] Over voltage
[ ] Motion range
[ ] Firmware error
[X] Init !
[ ] Motion
[ ] SimpleMotion
[ ] Configuration
What caused this fault?
Fault location ID1 0 (info)
Fault location ID2 0 (info)
! = reasons for inactivity[X] GPI 1
[X] GPI 2
[X] GPI 3
[ ] GPI 4
[X] GPI 5
[ ] GPI 6
[ ] HSIN 1
[ ] HSIN 2
[ ] ANA1 as digital
[ ] ANA2 as digital
[ ] ENC A
[ ] ENC B
[ ] ENC C
[ ] ENC D
[X] Hall U
[ ] Hall V
[ ] Hall W
[X] Soft enable
[X] Phys enable
[ ] Pos feed enable
[ ] Neg feed enable
[X] Home switch
[ ] Clear faults
Analog in 1 1.51 V
Analog in 2 0.00 V
Analog Enc A -3.52 V
Analog Enc B -3.56 V
HV bus voltage 47.9 VDC
Device temperature 31 °C
Actual current limit ±12.9 A
Last limit reason None
Output current 0.00 A
Velocity feedback 0 r/s
Velocity feedback (raw) 0
Position feedback 0 r
Position feedback (raw) 0
Setpoint value (raw) 0
Debug 1 -1
Debug 2 -1
Debug 3 -1
Debug 4 -1
Debug 5 -1
Debug 6 -1
Parameters
| GCFWVER=10720 | HWTYPE=11201 | HWSERIAL=112012621 | BUILDREVISION=3047e45
| CEI=2 | UID=1ed6c9cd | SMO=0 | TRF1=4
| TRF2=0 | TRA1=0 | TRA2=0 | MPP=0
| NOTCHFILT=655616 | TED=1 | TEF=0 | TEI=0
| SERIALENCBITS=6 | COMMUTATIONCFG=0 | HAO=0 | FBR=4096
| FBD=1 | FB2D=0 | TBW=11 | KVP=300
| KVI=30 | KPP=50 | VFF=0 | AFF=0
| PFF=85 | CM=2 | MT=3 | AD=0
| FLAGS=13 | MMC=12.86 | MCC=7 | FOC=6
| FOV=51 | FUV=20 | FPT=1000 | FVT=100
| FEV=100 | FMO=0 | LSF=0 | LFO=0
| AXS=1 | AXT=3 | FFT=0.1 | TSR=0
| TCH=2.09715e+06 | TTR=1 | TBT=0 | CRI=3
| DIV=50 | PIF=2500 | MUL=50 | CAL=10
| CSD=10 | CVL=1000 | CRV=100 | MR=5.613
| ML=10 | MTC=500 | MPC=8 | MMS=160
| CAO=0 | HOMING=0 | HMV=100 | HMA=10
| HMH=500 | HMT=1 | HHL=0 | HLL=0
| HMF=0 | HSA=0 | HSS=0 | overrideAddr1=0
| overrideAddr2=0 | overrideAddr3=0 | overrideVal1=0 | overrideVal2=0
| overrideVal3=0 | BED=1.5 | BER=0 | BDD=1
| CAPS1=6.29143e+07 | CAPS2=81823
the problem unfortunately persists
could it possibly be a hardware problem?