my Name is Marc and i´m planning to build my very first DIY direct-drive wheel and seek a bit of information, maybe you can help me out here:
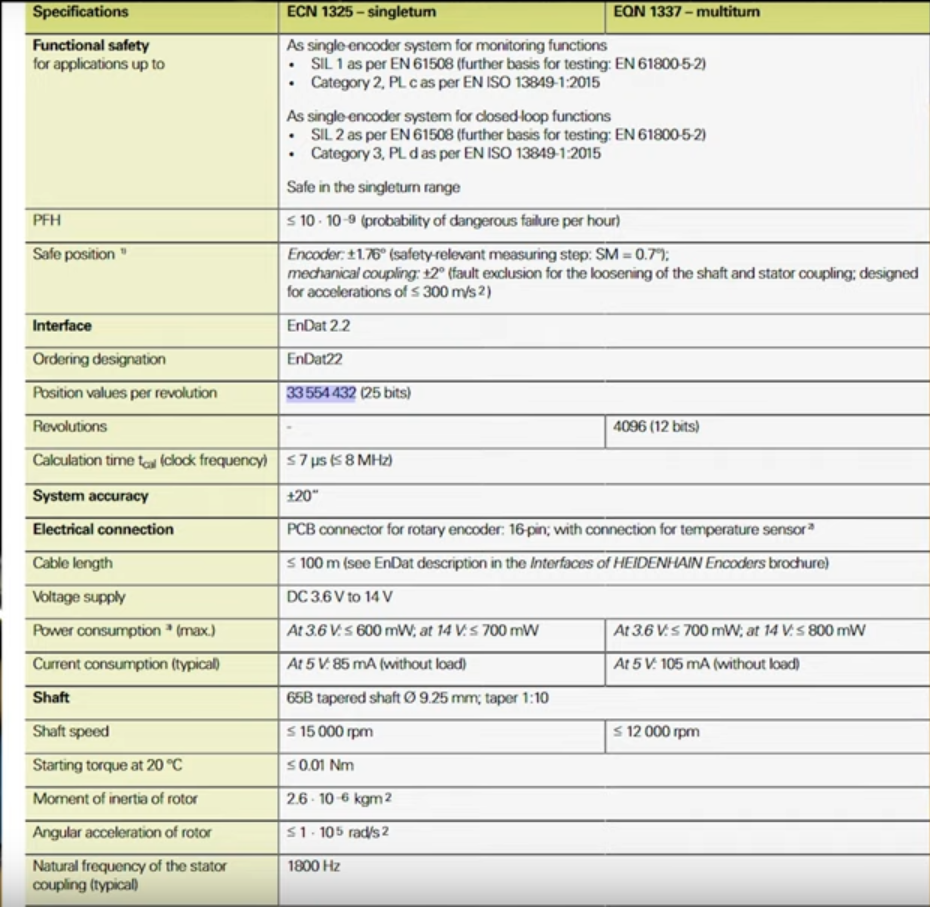
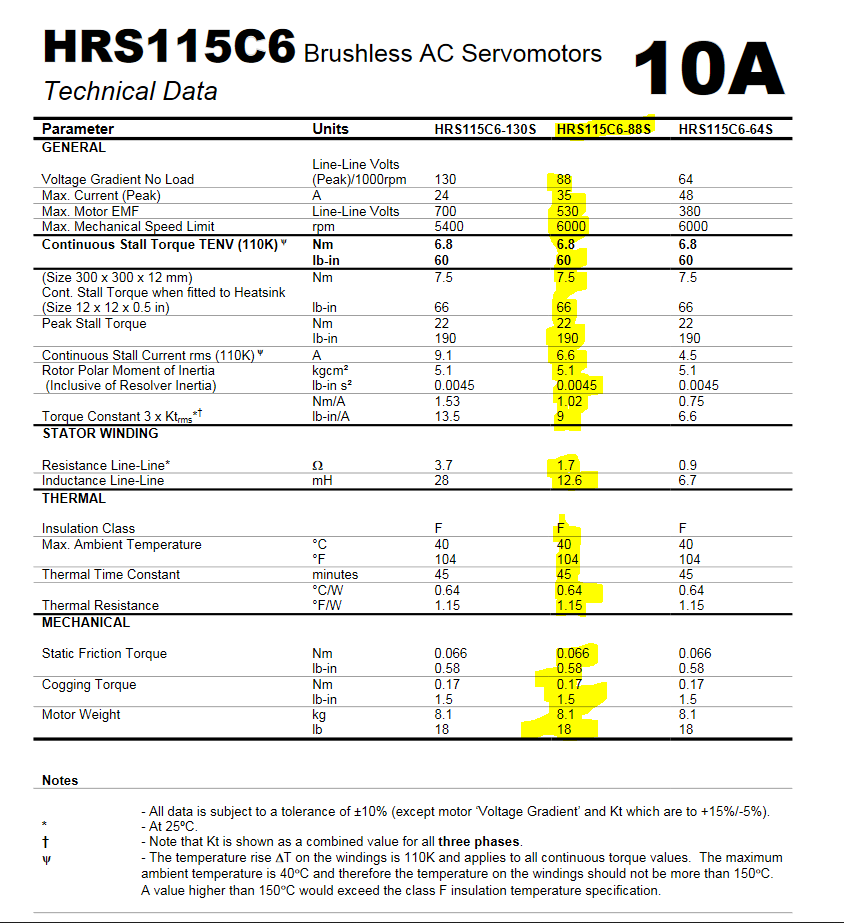
I somehow ended up with a SEM HR115C6-88S Motor + Heidenhain EQN1325 Encoder with EnDat Interface.
After lots of reading, trying to learn about the Servos and DD, i think this should be compatible with the Simucube 1 Board + Ioni PRO (HC) Driver but not 100% sure.
-Is the encoder compatible with the Simucube1+Ioni PRO (HC) and good enough to provide a nice experience ?
I tried to calculate the expected Nm but i´m honestly not sure if i did it correctly, so maybe someone can let me know what i can expect with that Motor.
Will it give me a good experience when doing iracing ? I´m honestly not quite sure, after reading a lot the MIGE sure would´ve been the better choice, but maybe someone can shine some light onto that topic.
Unless that encoder has secondary sincos outputs, it cannot be used for dd wheel. I had a quick look at the data sheet and it doesn’t seem like it does……
I would recommend getting a small Mige M10010, it will be better and easier.
Thanks for gettin back to me that quickly Mika and Phillip!
Afaik the Encoder should´ve a secondery sincos Output.
Would this be a usable source ?
I´m aware that this Motor is not as good as the above mentioned M10010 but i got my hands on it for a very cheap price tbh after seeing it in a video of a DIY DD.
I was just hoping to get a decent performance out of it.
If the encoder has a secondary SinCos output, yes, then it can be used, I have used something similar on my one akm65 servo which had a Heidenhain Endat encoder, but with the secondary SinCos output.
Worked very, very well, SinCos signal at 2.1M PPR was wonderfully smooth experience.