You can set mcc to rated and mmc to peak current. Just beware on such a small servo, you need a good mount to whisk the heat away, as that servo will run very hot at max torque.
these values are in rms , so basically you could put them even higher because in the configuration it is in pos. https://granitedevices.com/wiki/Peak_value_of_sine
so you can multiply these values with 1.414 to get the pos values. If you are going to use this setup for racing i would up the mcc closer to mmc.
The servos are rated up to 120 degrees Celcius. If you can keep hand on the servo for one second, then the temperature likely does not exceed 70 degrees.
But yeah, the smallest Mige servos are very inefficient.
Hi ! I added a 3D printed enclosure with a 120mm fan at one end, and holes at the other.
Now I can run the motor at 16A/15,5A without having the motor too hot (I can put my hand on it for like 5/10 seconds and 16A is already quite hard too turn).
It will help a lot if you can have a thick solid aluminium plate on the front as a mount. I am using a 16mm thick plate for my rig, that helped my smaller akm servos keep cool when doing extended testing during ioni development years…
I guess so but it would be very expensive to order an aluminium plate that would fit my specific rig
Otherwise, aluminium heat sinks do a good job, it’s largely enough to run at around 17A
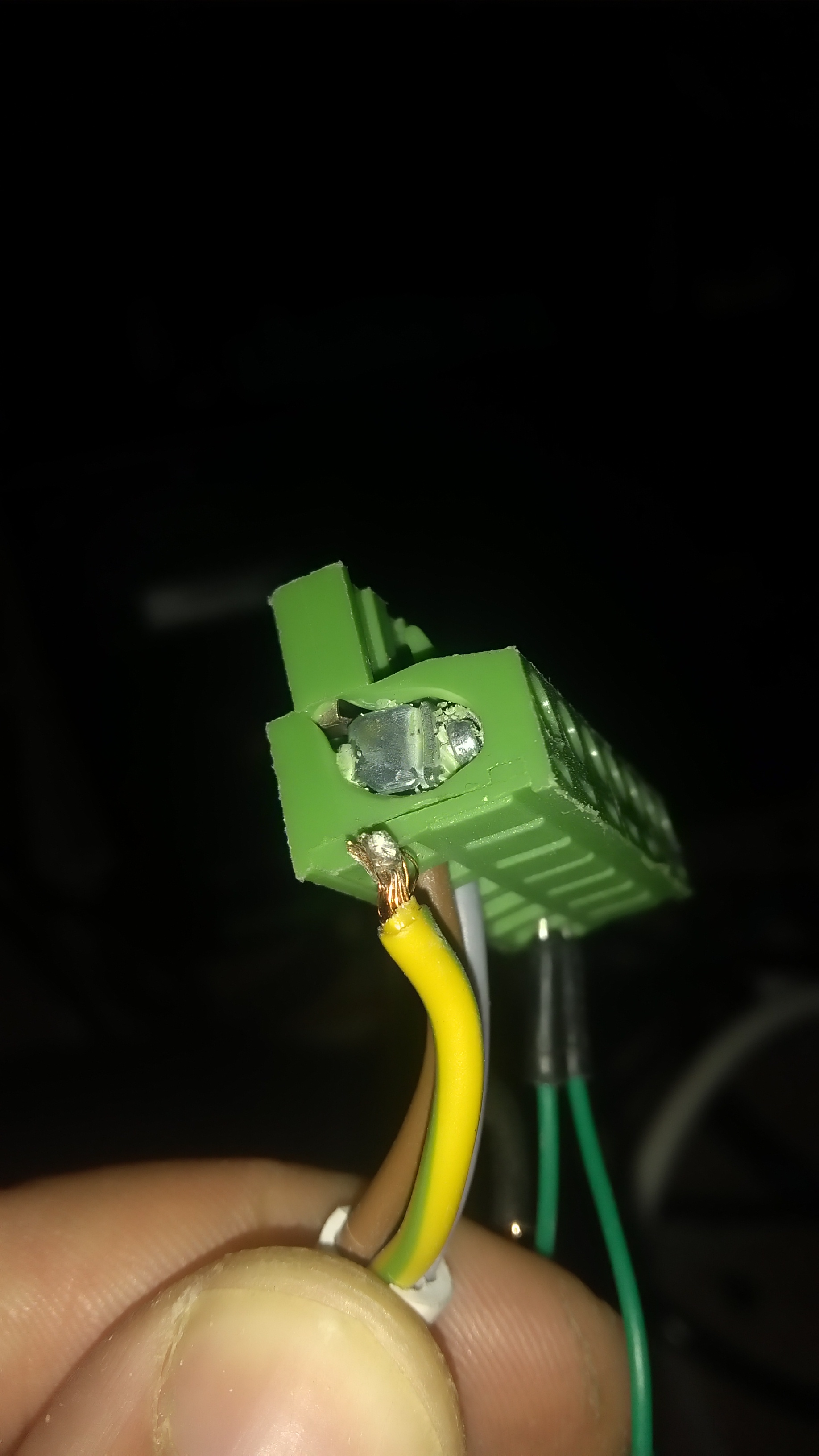
The problem if I run higher current is that the cables becomes just a bit hot (I am thinking about using bigger cables) and yesterday I discovered that the green connector melted
Heatsinks on the servo surely will help, seeing you can’t really do a solid front-plate …
That melted connector is due to a dry joint, it wasn’t tight enough, like you say, bad connection. I am running 25A pos through my big Bogeyman and have zero issues, of course though, provided the cables can handle the current…but I would be surprised if yours is to thin, to be honest.
Hmm… those heatsinks actually may not help as the motor fins has only thin contact surface to the bigger heatsink on top of it. Direct airflow to the motor fins itself is liekly better solution. If the bigger heatsink would sit on a flat surface (no motor fins at all but flat surface), then another story.
About the heatsinks. I agree, using heatsinks alone doesn’t help that much. Using a active cooling with a fan is very effective, but you then have something quite complex/expensive.
Anyway, I don’t use anything now. It comes quite hot sometimes when I tune the power up. But I can’t use it that way for a long time (more than an hour) because it hurts my wrist… And in any case, it doesn’t seem to wear anything…
Finally, I don’t advice to use this motor. Better go with the 90ST/110ST at least, or go for 130ST. On top of that you will find a lot of motor mount options.
I am now working on DIY sim racing project, like the first H-pattern hydraulic-clutch-controlled gearbox :






 )
)