Hi!
Are you using the Index point indexing mode or the Automatic indexing mode? Which encoder do you have?
Hi!
Are you using the Index point indexing mode or the Automatic indexing mode? Which encoder do you have?
22-bit Biss-C encoder - for 4.2 mil cpr resolution (Simracingbay latest)…
HOWEVER I just realized I never runned the Configure motor, encoder and center point…guide/setup (just got the wheel).
So after i runned this guide it seems to work! Sorry my bad. “Noob” lol
I have two different problems with centering my SC1 (large MIGE w/ SinCos 2,1 mil cpr, v0.50.4c). I have run the wizard a hundred times trying both of the indexing methods. Currently I use Automatic indexing.
This happens every single time and is mainly cosmetic problem.
===
On a related matter, I have never really understood, what the three different “wheel center dialogs” do differently.
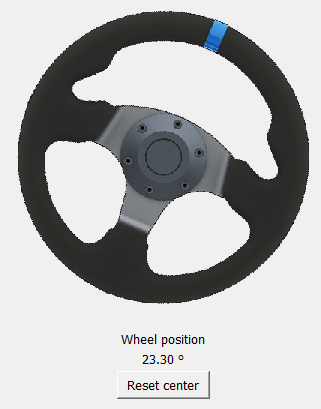
There is the “Reset Center” button on the first tab right beneath the wheel graphics:
![]()
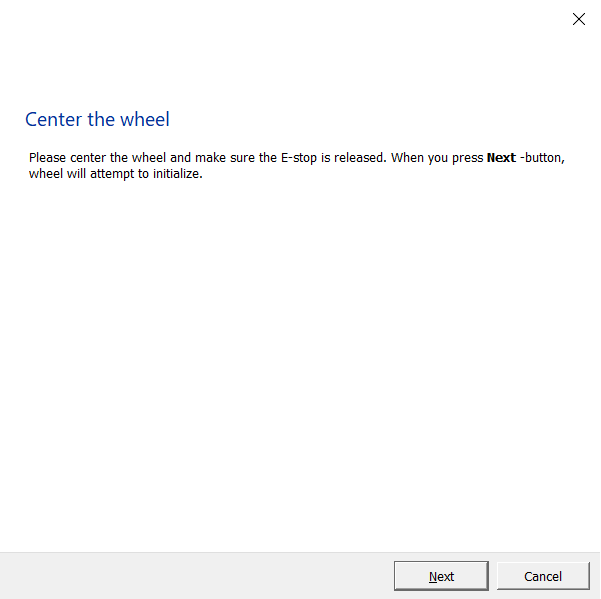
And then there is in the initialization wizard twice the request to center the wheel. Once it is called “Center the wheel”:
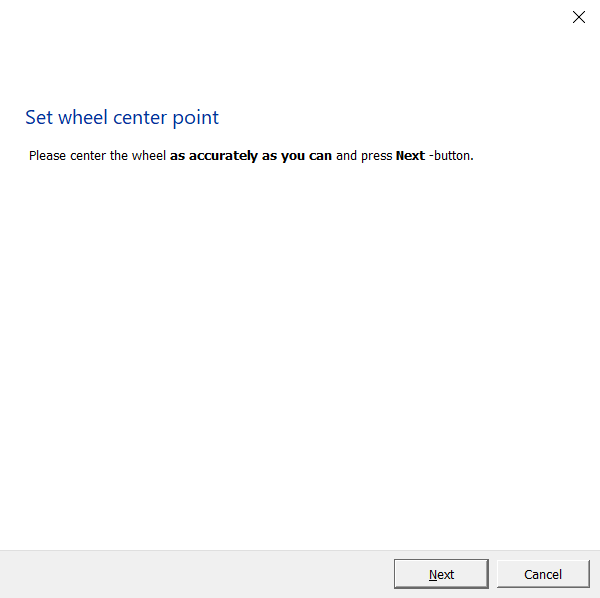
And then 2-3 steps after that in the same wizard it is called “Set wheel center point”:
I do not understand why the same has to be done twice in the initi wizard. And then, I do not understand the difference to the other button on the first tab. I have read the Wiki page quoted above. But really, I find it not very helpful.
Any help is very much appreciated. Thanks.
Firstly, in the wizard:
The first approximate center point is for forcing the device into a certain position. The wheel then begins the phase search routine at that position, and moves between motor poles in a quadrant. The end position for this is set as a reference position, and then the wizard will ask your accurate center position and saves this as an offset to the original.
Now, the Sincos encoder is not an absolute encoder, and phasing routine has to be run at every start. You might just be unlucky - the switchover point in the motor pole quadrants happens to be near your center point and thus the phasing sometimes runs in different pole quadrant and thus the center point will be wrong. This also explains the issue on device start for you.
Unfortunately, there is no way of overcoming this without using the Index Point indexing (if your encoder has it wired) or by using an absolute encoder such as BiSS-C.
Well, another way of overcoming this would be to adjust the axis shaft adapter to slightly different position so that your physical center point will not hit a pole quadrant switchover point.
Ok, so I would move the axis shaft adapter by, say, an eight of a full rotation in any direction?
What exactly do you mean by “…and phasing routine has to be run at every start.”? Do you mean the automatic left-right-left movement that is done automatically upon startup, or would you mean the initialization wizard, which I would have to run manually?
Also, I understand, the second dialog “Set wheel center point” sets the precise center point. What is the difference to the “Reset center” button from the first tab, then?
But nothing of this explains, why it initializes to 23° each time, correct?
Thanks.
Yes.
Yes, that is the phasing, i.e. phase search routine.
Both do exactly the same thing. Doing it from the wizard ensures that the wheel has not rotated after the phasing has completed.
It does explain if the phasing routine is not being done between same motor pole each time.
Ok, this is what I did:
I left the axis shaft adapter as is, but moved the wheel itself one bolt pattern clockwise. As it is a six hole wheel, the actual rotation is 1/6 of a full rotation.
I rerun the wizard (Automatic Indexing) and set the new wheel center.
Not touching the wheel (i.e. 100% centered @ 0°): shut down the PC, cut AC power for Simucube and then reboot.
After the bootup phase search routine, the wheel comes up like this: difficult to capture in a photo, but the wheel physically actually has some -5° or so and the tool shows it at +17.60°. WTF?

It should be possible to find an orientation for your wheel where the angle is correct. Otherwise, there seems to be a firmware issue that we will have to work on when we do Simucube 1 stuff again.
@Mika: But did I approach it correctly? If yes, I would move the wheel further clockwise on the bolt pattern, re-run the wizard and reboot? There are 4 positions left. I could easily do that. Please confirm.
@Mika: I now did as suggested and there is not a single position that works. Actually, the index center was not remembered on a single try.
red marker = start position (top)
green marker = current position (top)
I just repeated this six times:
The timelapse video is uncut. You will need to use your Pause button frequently:
Actually, there is two things wrong here:
A) The index center is lost completely each time.
B) Even with the index center lost, the wheel did not reinitialize to have the “new” center on top.
Please help!
There will be improvements in the next firmware version.
simucube 1 firmware , not 2.
Things have progressed just today. I hope to test drive before the weekend.
Any update on this? The Wiki entry (without download link) does not seem to mention any change/fix regarding the indexing, or did I overlook anything?
Its been reworked completely. I will be adding that mention before release.