I have a “standard” encoder 10000ppr (40000cpr) not the new ones Sincos / Biss-C.
Here we go,
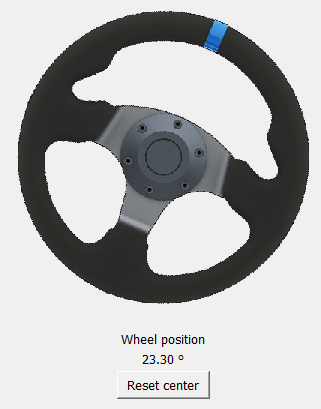
Correct Center
SimuCUBE Boot : 0
SimuCUBE Boot : 11
SimuCUBE Boot : 2
Flash settings data loaded : 0
Initial config has been previously performed. Initializing Drive. : 0
State: Initializing Drive : 0
First-time drive initialization : 0
SMBus baudrate initialized successfully : 0
Drive init stage 1, position : 5170
Read MMC value from Drive : 12500
Read Motor Resistance value from Drive : 2333
Read CPR from Drive : 40000
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 5019
Drive init stage 4, phasing, current position : 4969
Drive init stage 4, phasing, current position : 1261
Drive init stage 4, phasing, current position : 164
Drive init stage 4, phasing, current position : 2154
Drive init stage 4, phasing, current position : 5632
Drive init stage 4, phasing, current position : 8445
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request profile number : 1
Command: Request profile name for profile : 1
Command: Request profile byte data for profile : 1
Command: Request profile number : 2
Command: Request profile name for profile : 2
Command: Request profile byte data for profile : 2
Command: Request profile number : 3
Command: Request profile name for profile : 3
Command: Request profile byte data for profile : 3
Command: Set calibrated analog axis mode : 0
Drive init stage 4, phasing, current position : 9075
Drive init stage 4, phasing, current position : 7406
Drive init stage 4, phasing, current position : 5067
Drive init stage 4, phasing, current position : 3466
Drive init stage 4, phasing, current position : 3301
Drive init stage 4, phasing, current position : 4286
Drive init stage 4, phasing, current position : 5530
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request profile number : 1
Command: Request profile name for profile : 1
Command: Request profile byte data for profile : 1
Command: Request profile number : 2
Command: Request profile name for profile : 2
Command: Request profile byte data for profile : 2
Command: Request profile number : 3
Command: Request profile name for profile : 3
Command: Request profile byte data for profile : 3
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 6176
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 2
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 5836
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 3
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 4
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 5
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 6
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 5436
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 7
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 8
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 9
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 5435
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 10
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 11
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 12
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 13
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 5434
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 14
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 15
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 16
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 5434
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 17
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 18
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 19
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 20
Drive init stage 4, phasing, current position : 12
Drive init stage 5, phasing complete, position : 11
Drive init complete, offset from startup position is : 11
event 96 : 11
SMBus baudrate initialized successfully : 0
State: Drive initialization was successful : 0
SM Watchdog enabled successfully : 0
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Event log download request : 0
Wrong Center
SimuCUBE Boot : 0
SimuCUBE Boot : 11
SimuCUBE Boot : 2
Flash settings data loaded : 0
Initial config has been previously performed. Initializing Drive. : 0
State: Initializing Drive : 0
First-time drive initialization : 0
SMBus baudrate initialized successfully : 0
Drive init stage 1, position : 6120
Read MMC value from Drive : 12500
Read Motor Resistance value from Drive : 2333
Read CPR from Drive : 40000
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 5961
Drive init stage 4, phasing, current position : 5911
Drive init stage 4, phasing, current position : 2212
Drive init stage 4, phasing, current position : 1131
Drive init stage 4, phasing, current position : 3142
Drive init stage 4, phasing, current position : 6620
Drive init stage 4, phasing, current position : 9424
Drive init stage 4, phasing, current position : 10133
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request profile number : 1
Command: Request profile name for profile : 1
Command: Request profile byte data for profile : 1
Command: Request profile number : 2
Command: Request profile name for profile : 2
Command: Request profile byte data for profile : 2
Command: Request profile number : 3
Command: Request profile name for profile : 3
Command: Request profile byte data for profile : 3
Command: Set calibrated analog axis mode : 0
Drive init stage 4, phasing, current position : 8361
Drive init stage 4, phasing, current position : 6025
Drive init stage 4, phasing, current position : 4430
Drive init stage 4, phasing, current position : 4265
Drive init stage 4, phasing, current position : 5250
Drive init stage 4, phasing, current position : 6495
Drive init stage 4, phasing, current position : 7122
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request profile number : 1
Command: Request profile name for profile : 1
Command: Request profile byte data for profile : 1
Command: Request profile number : 2
Command: Request profile name for profile : 2
Command: Request profile byte data for profile : 2
Command: Request profile number : 3
Command: Request profile name for profile : 3
Command: Request profile byte data for profile : 3
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 6930
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 2
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 6436
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 3
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 4
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 5
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 6
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 6402
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 7
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 8
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 9
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 6402
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 10
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 11
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 12
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 13
Drive init stage 4, phasing, current position : 6401
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 14
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 15
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 16
Command: Request analog input settings : 0
Drive init stage 4, phasing, current position : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 17
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 18
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 19
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 20
Drive init stage 4, phasing, current position : 13
Drive init stage 5, phasing complete, position : 13
Drive init complete, offset from startup position is : 13
event 96 : 13
SMBus baudrate initialized successfully : 0
State: Drive initialization was successful : 0
SM Watchdog enabled successfully : 0
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Event log download request : 0