Hi i am using the Simicube 2 sport and it is less than 3 weeks old bought from Track racer… the wheel has been great and consistent up untill now…
i am now constantly loosing ffb, the ffb is not consistent either and its not down to it clipping i dont think " No audio clipping noise coming from the base " . Also the steering now feels really loose and not sharp like it was… The base is also running extremely hot to touch and feels like i loose all feedback and sensitivity as the car wont turn sharply/response like it used to. The steering is not consistent.
I have tried all the recommendations i have found on this forum. Set back to a default profile and start again, re installed true drive software, unplugged everything and plugged it back in. went through setting back up my profile to how i want it when i first bought it and it still feels loose. Tried different USB ports and still the same issue.
( I have not tried Ctrl E yet as awaiting response from GD and to be instructed to do so by GD )
I have not had any Windows updates to do since ive bought the base so it cant be a Windows update issues.
I have also used another PC and still have the same issues
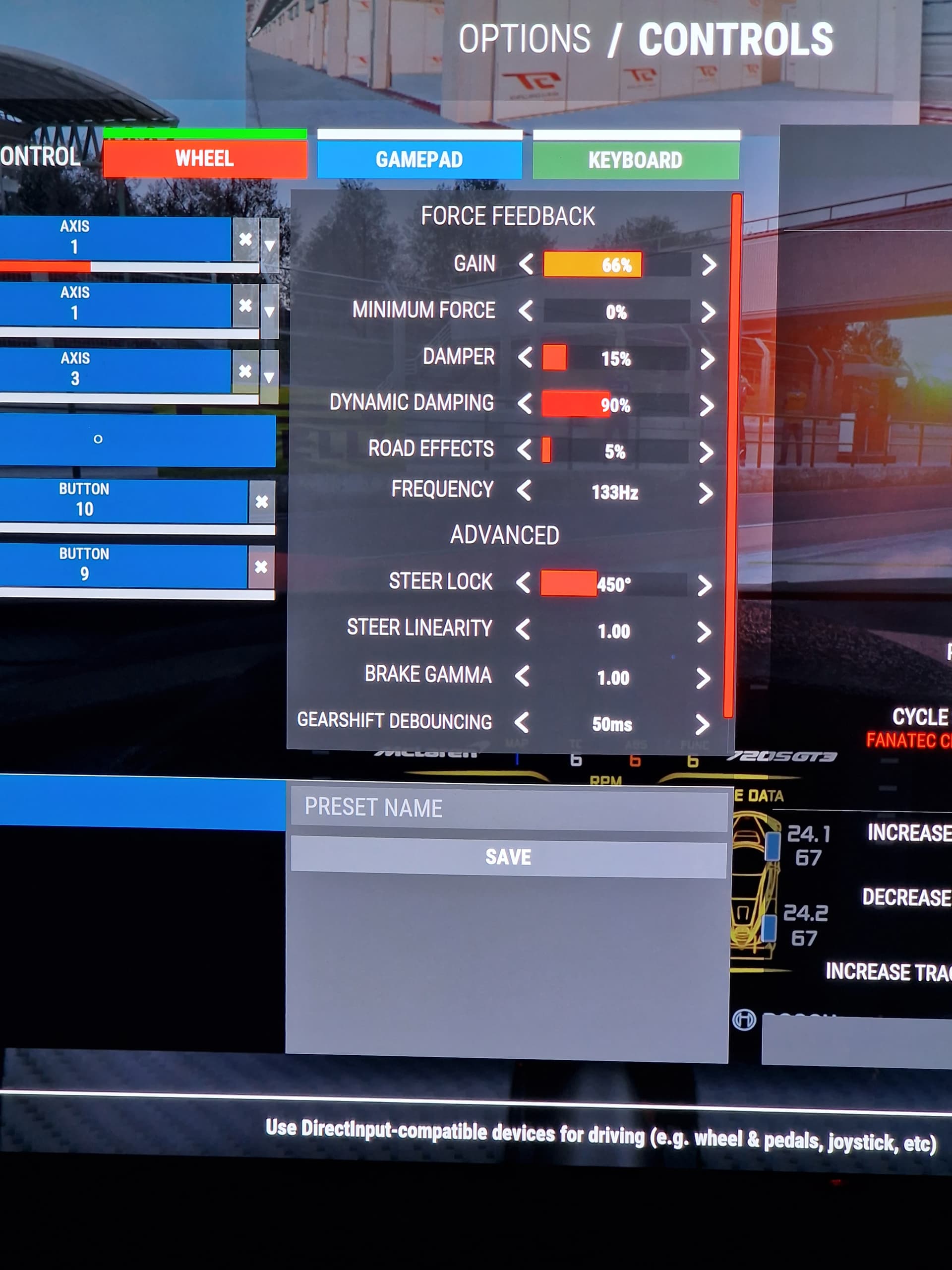
The game i am playing is ACC.
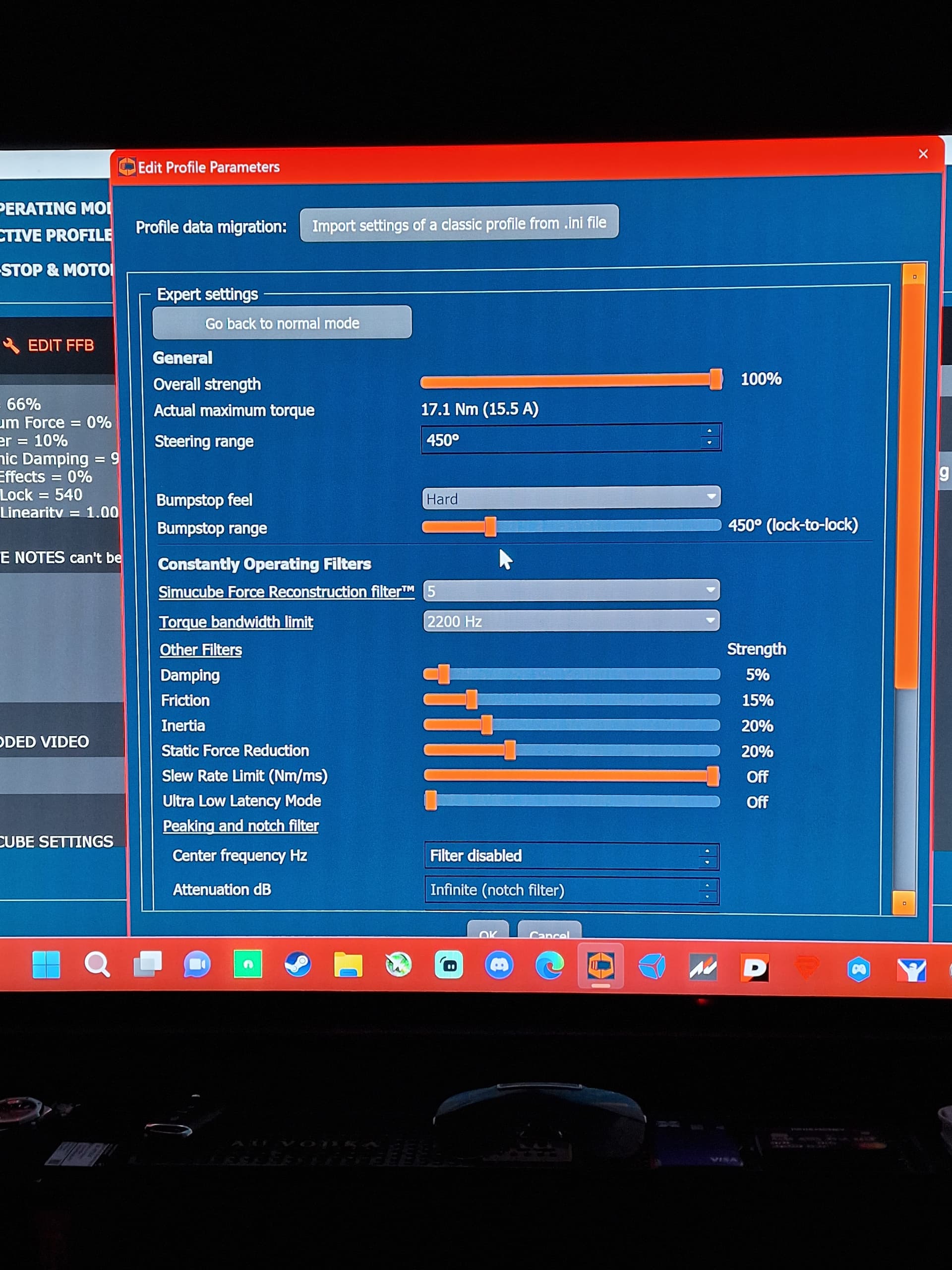
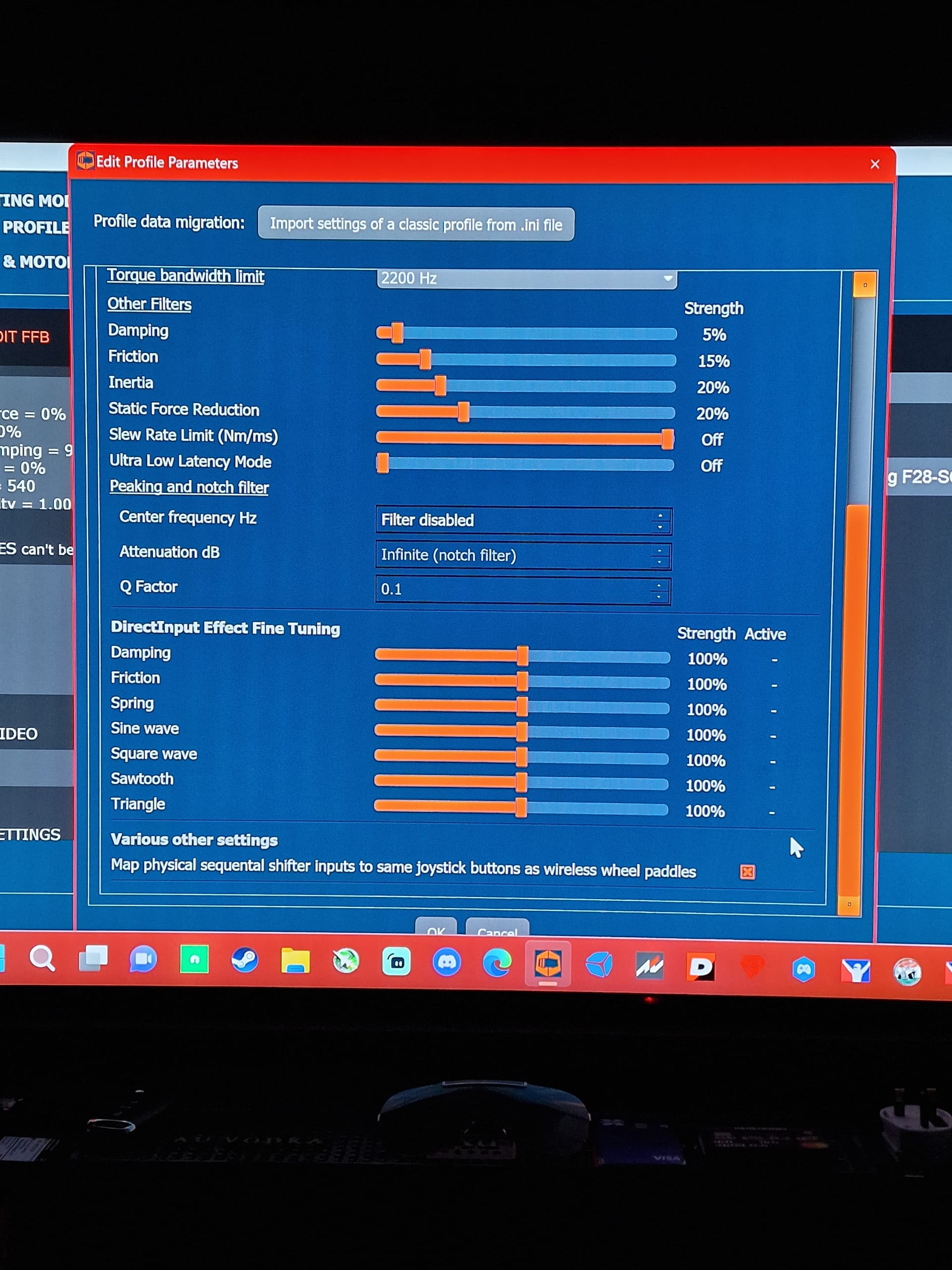
Below i will attach photos of the settings i am currently running in the TD software. I will aslo attach the settings i am running in ACC
What is the normal operating temperature for the simucube 2 sport please ?
Many thanks,
Jonathan Chick.