Hello everyone! I want to homing Linmot ps02-23sx80f-hp-k motor with IONICube 1x. The instructions I followed:
-
https://granitedevices.com/wiki/Using_LinMot_linear_actuator_with_IONI_servo_drive
-
https://shop.linmot.com/data/import/Dokumente/0185-0002-E_3V3_IG_Linear_Motors_Short_Type.pdf
-
https://shop.linmot.com/data/import/Dokumente/0185-1008-E_1V1_DS_Linear_Motors_P02-23Sx80F-HP.pdf
And some motor values:
Technical Data
Max. Stroke 780 mm
Max. Force 67 N
Continuous Force 13/24 N
Max. Velocity 7.3 m/s
Position Repeatability ±0.05 mm
Mechanical Data
Stator Diameter 23 mm
Stator Length 105 mm
Stator Mass 245 g
Slider Diameter 12 mm
Slider Length 130 - 850 mm
Slider Mass 90 - 700 g
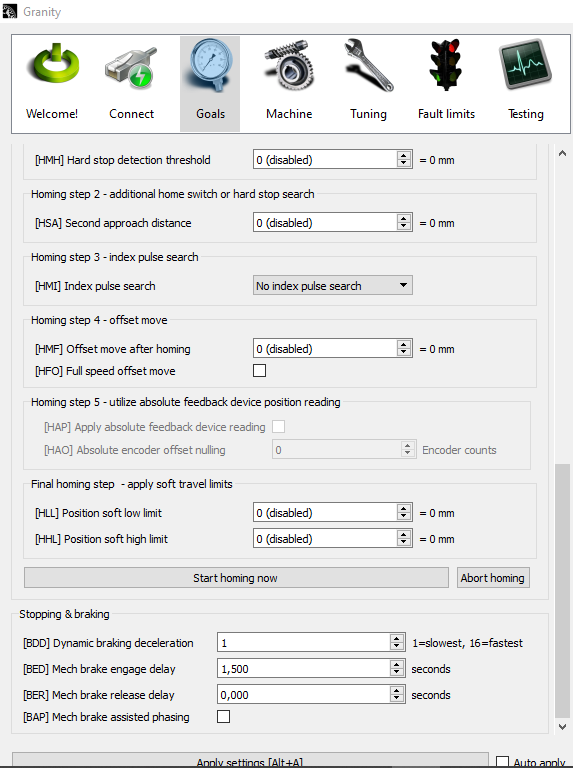
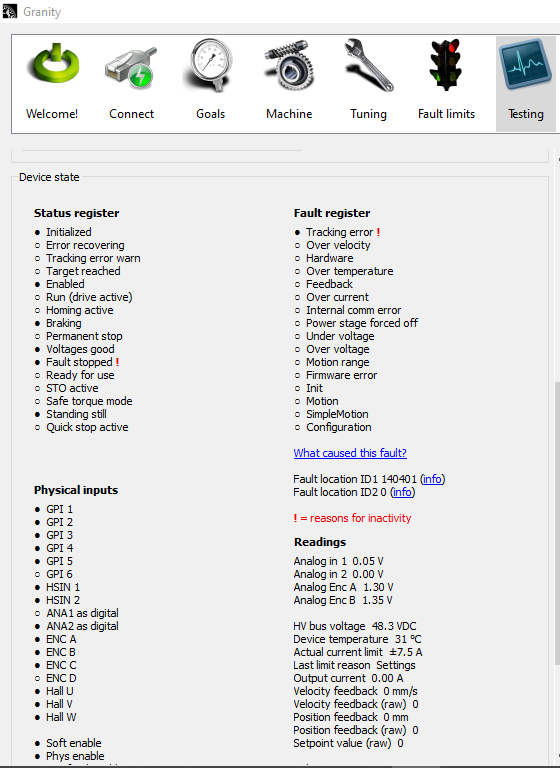
I want to homing but Tracking Fault gives. Now let’s go in order:
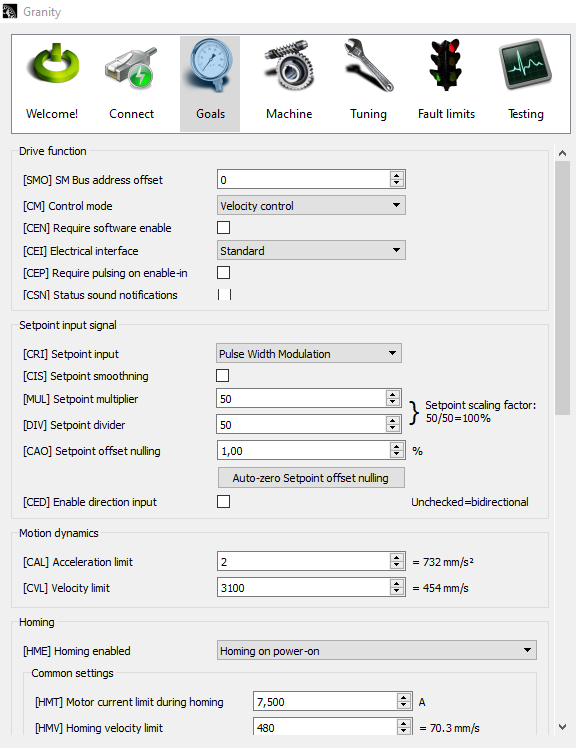
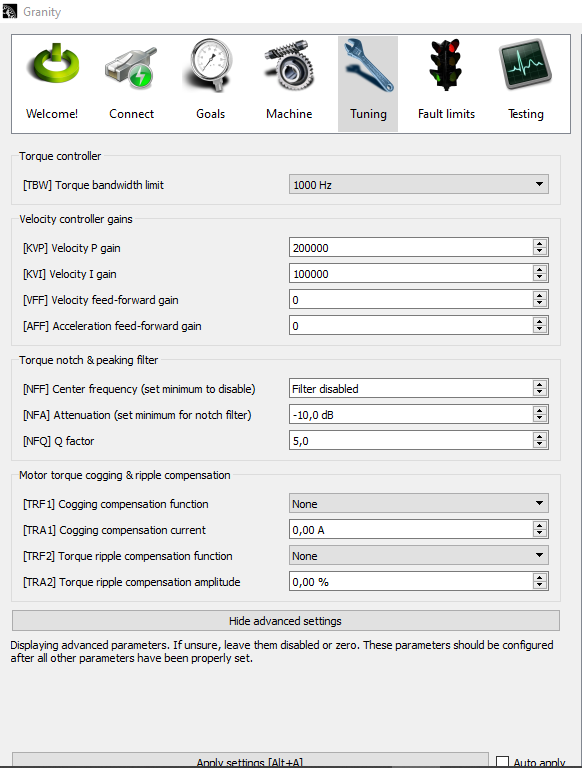
- I’m not sure about Motion Dynamics.
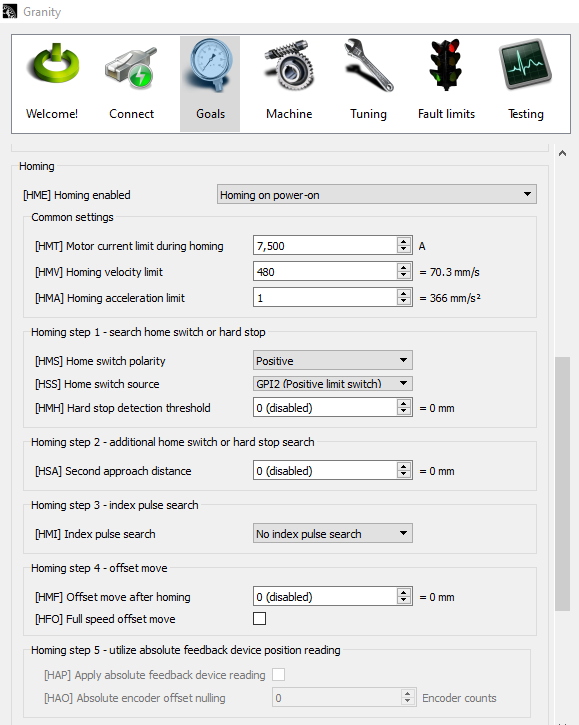
- Again I’m not sure most of them.
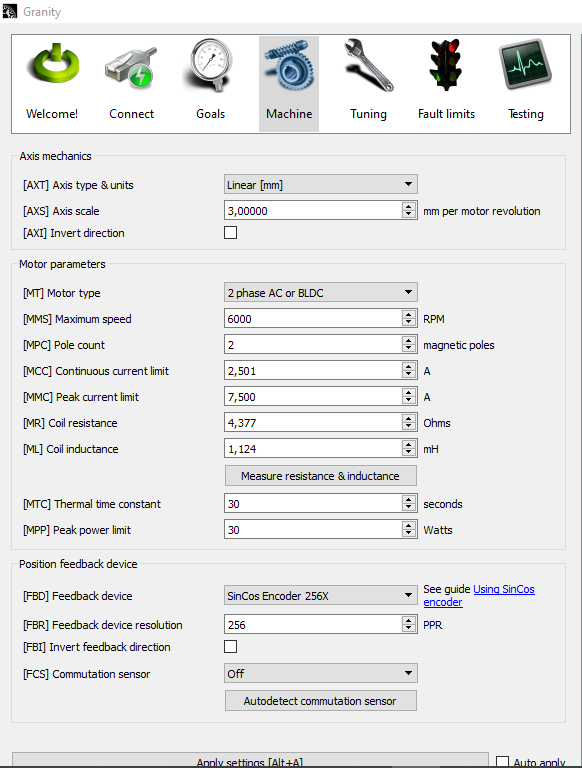
- Axis Scale, Max Speed RPM, MTC, even feedback device. When I click Autodetect Commutation Sensor, motor gives an tracking fault when it performs 90%.
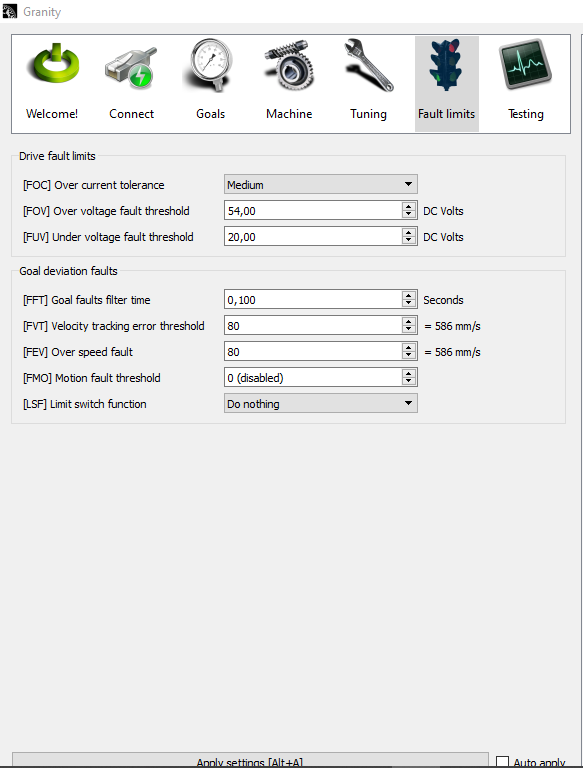
- I’m not sure FVT and FEV.
Actualy I’m not sure about some parameters. Some values are not written in Linmot Technical Data. I want to do everything as in Wiki, but it doesn’t work. I’ve also looked at a few solutions for the Tracking Fault, but I can’t find the appropriate parameters for Linmot. Sorry for that  What should I do?
What should I do?