@Manolo The OS FW is not ready yet, but source code will be publicly available here https://github.com/simucube.
Im sorry, its all unknown for me. I think is wait for your updates.
it’s possible to add rotary encoder to adjust FFB strength and damping on the fly?
Sounds like more subject to SimuCUBE and SimuCUBE OS firmware. It is our plan to add such function for potentiometers (there are already inputs on boards for this). I think potentiometers are better here as they are absolute and will remember your setting on power off.
- Sine commutation support
- High voltage encoder support
- Motor thermal sensor support
Some hardware revisions probably required but I can dream. 
Indeed at least high voltage encoder support would require HW changes. This could be done with external adapter though.
Sine commutation has been a standard feature of GD drives since 2007 
Sorry, I should have specified better. I’m referring to encoder sine commutation for encoders with an additional encoder track that equals a single sine and cosine period per revolution providing absolute positioning.
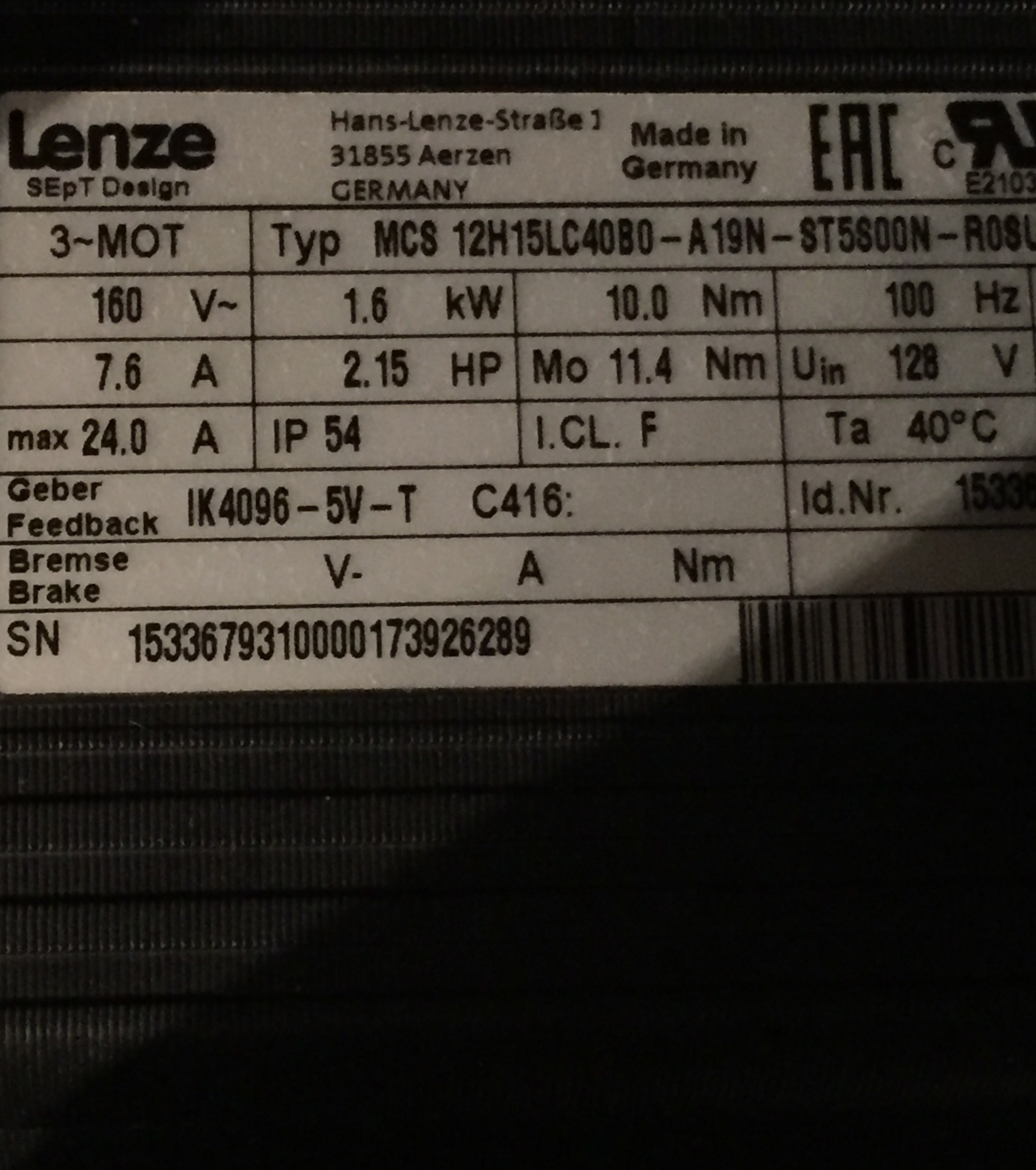
@Berniyh not sure if I have exact same Lenze servo as you - as Im moving from argon to simucube next week interested in how you get on with settings, thanks.
@phillip.vanrensburg should I cut losses and move from Lenze to a “better” marching servo for simucube?
Hi Jon,
your Lenze motor is the perfect match for the SimuCUBE. It’s the ‘low voltage’ (230V) version of the motor.
The ‘L’ in the model name does make the big difference.
Thanks Martin for clarifying, really appreciate that. Found the Lenze documentation breaking down the model number. Cheers!

Source: p.16
Yep, indeed the same as mine, I have a new one arriving hopefully tomorrow or latest Monday. Will share my settings once up and running, latest net weekend. I sold my previous Lenze/SimuCube setup to a desperate friend
Hi,
Manolo was talking about cogging and the TRF parameters. Not sure what he is trying to achieve, but I try to eliminate cogging on my MiGE 130ST-M10010.
The “Configuring cogging torque compensation” wiki describes following formula:
Sin(Nx) or Cos(Nx): N=2*number_of_cogs/pole_count
I feel 68 cogs per revolution with unpowered motor and have 8 poles, which results in N=17, but maximum value for TRF1 in Granity is 12 as mentioned by Manalo.
Is there an understanding problem on my side or do I also need higher TRF1 values?
Thanks a lot!!
Hello,
I am really glad to see, that the 1.6.x IONI firmware specifies BiSS and SSI, have been waiting this to happen. Curious to see bit depth limits, the perfectionists want sometimes even more :). Just for a handful of bits more (26/ 32/36 bit) and it could cover the Renishaw Resolute series for example. I assume the SSI/BiSS support would trickle to the ARGON too?
Regards,
Tom
Aah, thanks fro clarification. This is probably not doable in useful manner as it would consume the necessary encoder input pins that are only pins there to read analog value.
Sounds like you might need higher order TRF as you mentioned. We’re planning some form of lookup table based method there too, which would be more universal and covers higher order ripples too. No date on that yet.
@NCG The limit is 32 bits currently but we could support higher as well. Can you point to some encoder specs with more than 32 bits of resolution?
Yes, Argon support should follow (if there is enough demand) after testing on Ioni has been completed.
Hi Tero,
thanks for that info! I understand that this is not on top of your list. Still it could be useful for all, as in some games there is really bad cogging when forces get high (like in LFS) and high filter settings in MMOS must be used to get around that.
Thanks again!
Cheers
Max
The 32 bit resolution already supported, that is nice to hear! Going to try it with RESA and RA32BAA. The wiki probably needs to be updated, my 24 bit max single turn resolution information came from there. AFAIK, 36 bit is used only for long Resolute linear encoders currently.
Hey Guys,
For those asking about the Lenze (and other servos), I made a basic spreadhseet to show main used servos and what we can expect from 48V power source via IONI.
I ordered new Lenze MCS 12H15L and MCS 12H15 arrived, so now I have 400VAC version which will give only ~15NM torque at 48V. I will look at some mods to make things a bit better here. Hope the below is handy for some.
Cheers,
Beano
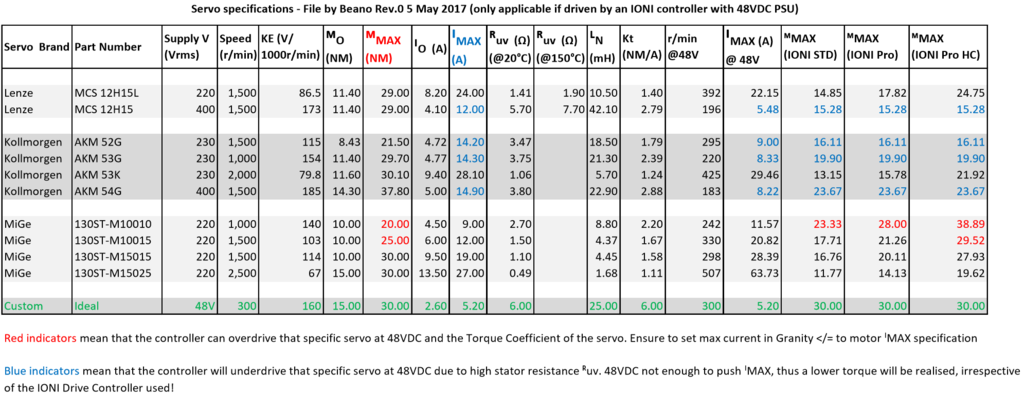
@ Beano: not quite. It’s rather 16.6 Nm at 48V.
But the common PSUs have the option to increase the voltage up to 55V, which should be ok at the given currents.
Only the Meanwell 480W (without peak option) might struggle there.
In case of 55V you could reach up to 19 Nm.
Although the question is if it actually matters.
I’m running it at 17-18 Nm and actually are only using about 40-50% of the torque in-game. So there is plenty of headroom.
I am still thinking about switching to the 230V version, but mainly because I do have the 960W PSU anyway and it is said to have slightly better response and less cogging, which I’d appreciate because I love drifting.
But I’m pretty happy with my Lenze. 