Simucube Boot : 1
Simucube Boot : 0
Simucube Boot : 22
Flash settings data loaded : 0
First-time drive initialization : 0
Initial config has been previously performed. Initializing Drive. : 0
State: Initializing Drive : 0
Drive init stage 1, position : 857233
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 857237
Drive init stage 4, phasing, current position : 857241
State: Drive initialization was successful : 0
State: Set baudrate : 0
SM Watchdog enabled successfully : 0
SMBus baudrate initialized successfully : 4500000
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request profile number : 1
Command: Request profile name for profile : 1
Command: Request profile byte data for profile : 1
Command: Request profile number : 2
Command: Request profile name for profile : 2
Command: Request profile byte data for profile : 2
Command: Request profile number : 3
Command: Request profile name for profile : 3
Command: Request profile byte data for profile : 3
Command: Request profile number : 4
Command: Request profile name for profile : 4
Command: Request profile byte data for profile : 4
Command: Request profile number : 5
Command: Request profile name for profile : 5
Command: Request profile byte data for profile : 5
Command: Request profile number : 6
Command: Request profile name for profile : 6
Command: Request profile byte data for profile : 6
Command: Request profile number : 7
Command: Request profile name for profile : 7
Command: Request profile byte data for profile : 7
Command: Request profile number : 8
Command: Request profile name for profile : 8
Command: Request profile byte data for profile : 8
Command: Request profile number : 9
Command: Request profile name for profile : 9
Command: Request profile byte data for profile : 9
Command: Request profile number : 10
Command: Request profile name for profile : 10
Command: Request profile byte data for profile : 10
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 2
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 3
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 4
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 5
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 6
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 7
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 8
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 9
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 10
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 11
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 12
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 13
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 14
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 15
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 16
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 17
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 18
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 19
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 20
Command: Set calibrated analog axis mode : 0
Command: Release SMBUS : 0
State: Releasing SM Bus : 0
SM Watchdog enabled successfully : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
State: SM Bus released successfully : 0
Command: Regain SMBUS : 1
State: Regaining SMBus : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
Drive init stage 1, position : 858341
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 858341
Drive init stage 4, phasing, current position : 858341
Drive init stage 4, phasing, current position : 858341
Drive init stage 4, phasing, current position : 858278
State: Drive initialization was successful : 0
State: Set baudrate : 0
SM Watchdog enabled successfully : 0
SMBus baudrate initialized successfully : 4500000
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Release SMBUS : 0
State: Releasing SM Bus : 0
SM Watchdog enabled successfully : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
State: SM Bus released successfully : 0
Command: Regain SMBUS : 1
State: Regaining SMBus : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
Drive init stage 1, position : 859213
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 859213
Drive init stage 4, phasing, current position : 859214
Drive init stage 4, phasing, current position : 859213
Drive init stage 4, phasing, current position : 859133
State: Drive initialization was successful : 0
State: Set baudrate : 0
SM Watchdog enabled successfully : 0
SMBus baudrate initialized successfully : 4500000
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Release SMBUS : 0
State: Releasing SM Bus : 0
SM Watchdog enabled successfully : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
State: SM Bus released successfully : 0
Command: Regain SMBUS : 1
State: Regaining SMBus : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
Drive init stage 1, position : 859565
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 859565
Drive init stage 4, phasing, current position : 859566
Drive init stage 4, phasing, current position : 859569
Drive init stage 4, phasing, current position : 859501
State: Drive initialization was successful : 0
State: Set baudrate : 0
SM Watchdog enabled successfully : 0
SMBus baudrate initialized successfully : 4500000
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Request profile number : 0
Command: Request profile name for profile : 0
Command: Request profile byte data for profile : 0
Command: Request profile number : 1
Command: Request profile name for profile : 1
Command: Request profile byte data for profile : 1
Command: Request profile number : 2
Command: Request profile name for profile : 2
Command: Request profile byte data for profile : 2
Command: Request profile number : 3
Command: Request profile name for profile : 3
Command: Request profile byte data for profile : 3
Command: Request profile number : 4
Command: Request profile name for profile : 4
Command: Request profile byte data for profile : 4
Command: Request profile number : 5
Command: Request profile name for profile : 5
Command: Request profile byte data for profile : 5
Command: Request profile number : 6
Command: Request profile name for profile : 6
Command: Request profile byte data for profile : 6
Command: Request profile number : 7
Command: Request profile name for profile : 7
Command: Request profile byte data for profile : 7
Command: Request profile number : 8
Command: Request profile name for profile : 8
Command: Request profile byte data for profile : 8
Command: Request profile number : 9
Command: Request profile name for profile : 9
Command: Request profile byte data for profile : 9
Command: Request profile number : 10
Command: Request profile name for profile : 10
Command: Request profile byte data for profile : 10
Command: Request hardware settings : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 0
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 1
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 2
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 3
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 4
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 5
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 6
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 7
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 8
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 9
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 10
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 11
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 12
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 13
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 14
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 15
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 16
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 17
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 18
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 19
Command: Request analog input settings : 0
Command: Request bytedata for analog profile : 20
Command: Set calibrated analog axis mode : 0
Command: Release SMBUS : 0
State: Releasing SM Bus : 0
SM Watchdog enabled successfully : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
State: SM Bus released successfully : 0
Command: Regain SMBUS : 1
State: Regaining SMBus : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
Drive init stage 1, position : 860064
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 860062
Drive init stage 4, phasing, current position : 860065
Drive init stage 4, phasing, current position : 860065
Drive init stage 4, phasing, current position : 860001
State: Drive initialization was successful : 0
State: Set baudrate : 0
SM Watchdog enabled successfully : 0
SMBus baudrate initialized successfully : 4500000
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Release SMBUS : 0
State: Releasing SM Bus : 0
SM Watchdog enabled successfully : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
State: SM Bus released successfully : 0
Command: Regain SMBUS : 1
State: Regaining SMBus : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
Drive init stage 1, position : 860151
Read MMC value from Drive : 12000
Read Motor Resistance value from Drive : 2880
Read CPR from Drive : 4194304
Read Drive Version ID from drive : 11201
SM Watchdog disabled successfully : 0
Waiting for faults to clear : 0
Waiting for servo to be ready : 0
Drive init stage 3, position after faults cleared : 860149
Drive init stage 4, phasing, current position : 860150
Drive init stage 4, phasing, current position : 860150
Drive init stage 4, phasing, current position : 860098
State: Drive initialization was successful : 0
State: Set baudrate : 0
SM Watchdog enabled successfully : 0
SMBus baudrate initialized successfully : 4500000
State: Before operational - calculating new constant values : 0
State: Operational : 0
Command: Release SMBUS : 0
State: Releasing SM Bus : 0
SM Watchdog enabled successfully : 0
SM Watchdog disabled successfully : 0
SMBus baudrate initialized successfully : 460800
State: SM Bus released successfully : 0
Command: Event log download request : 0
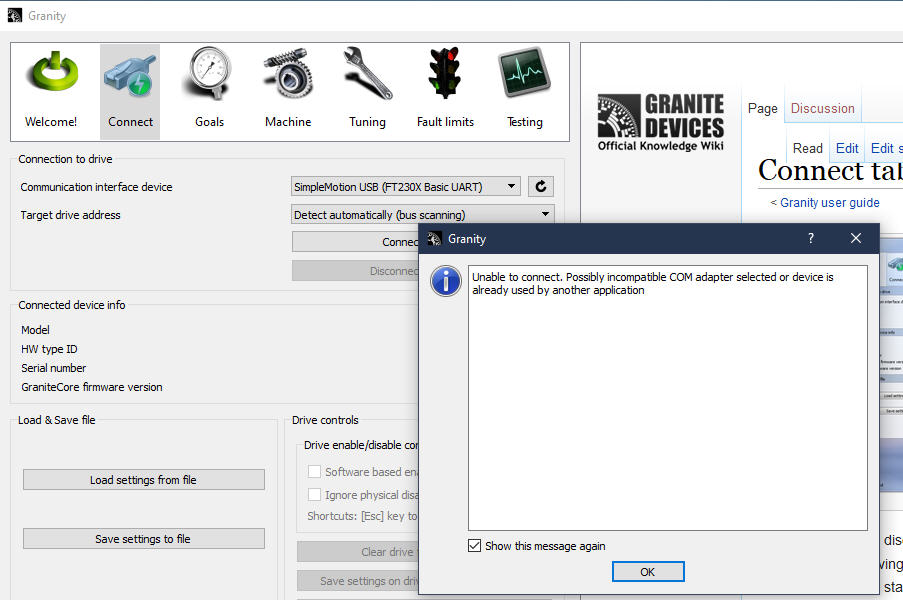
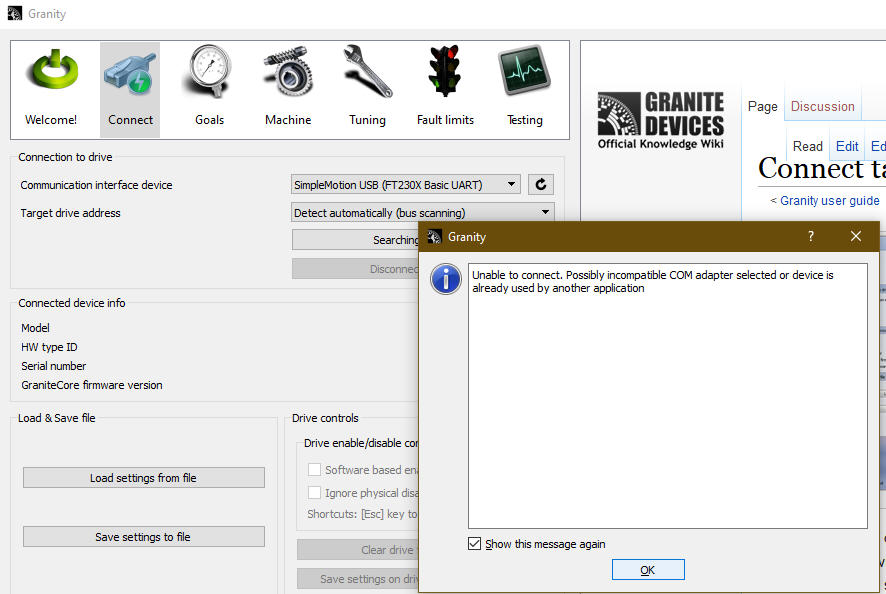
the problem is not solved
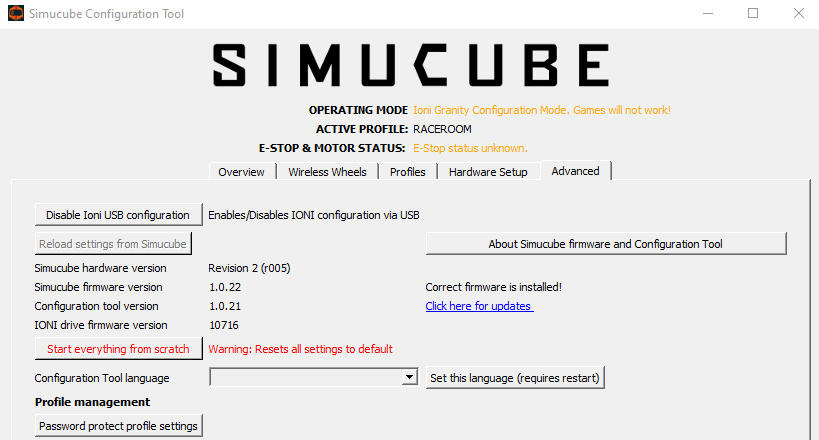
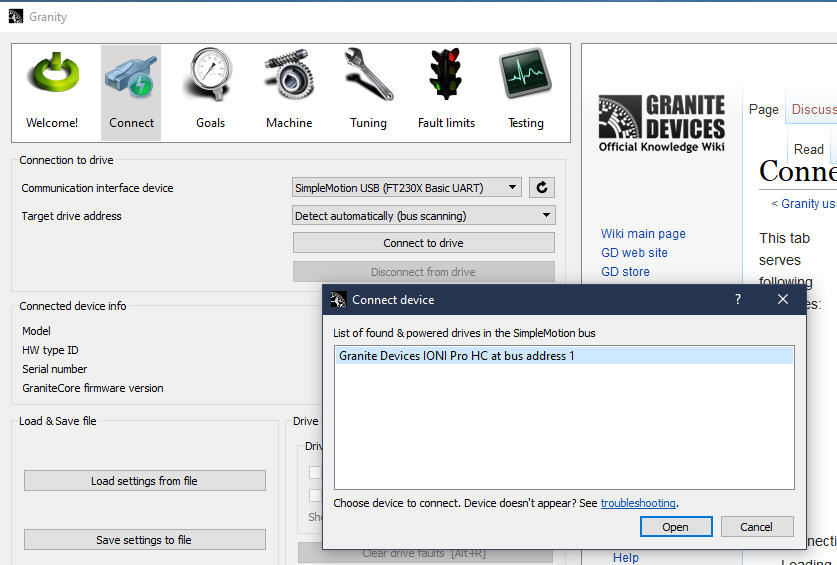
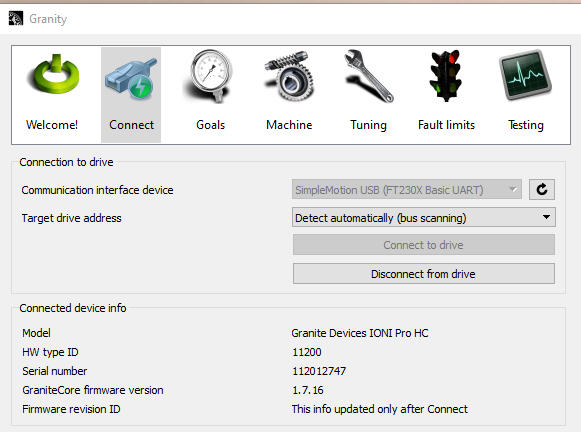
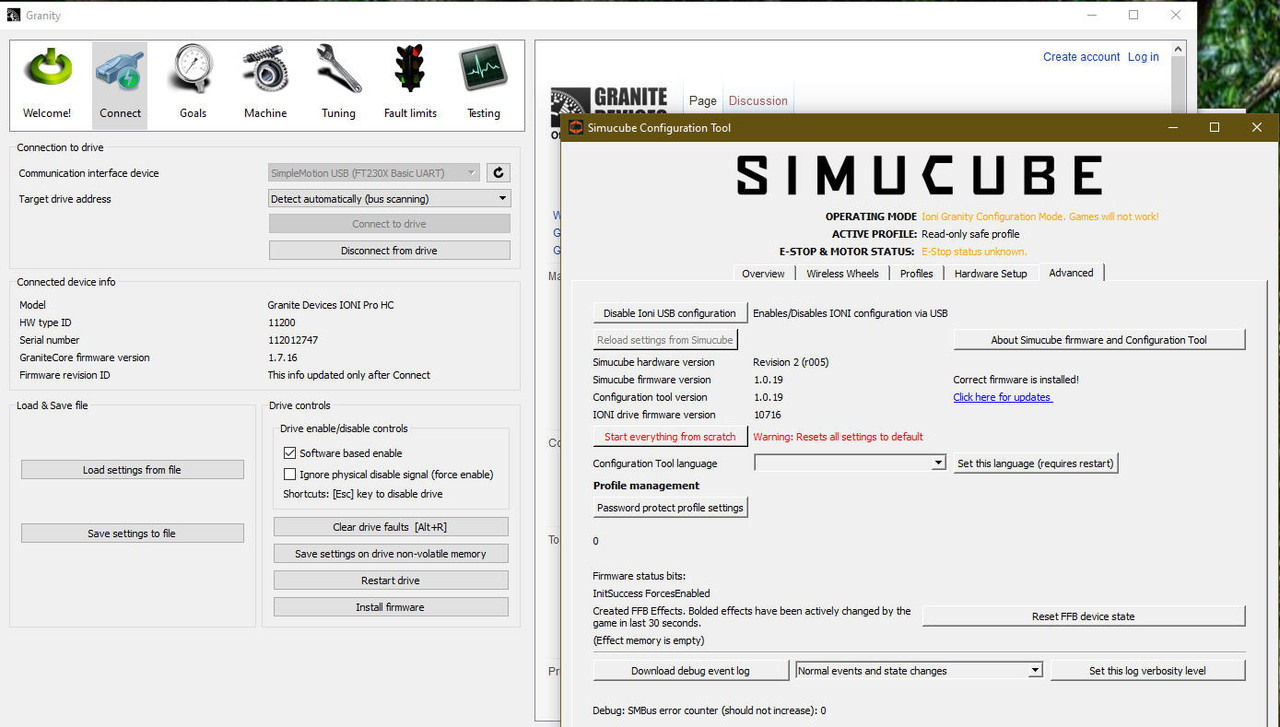
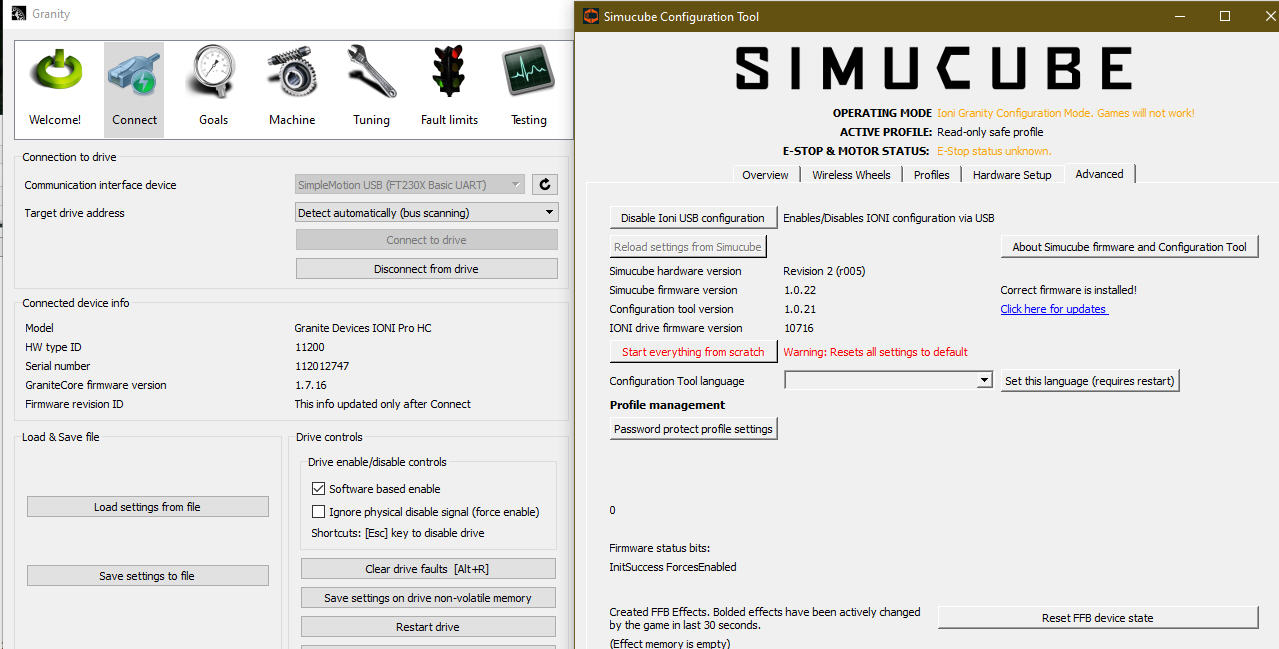
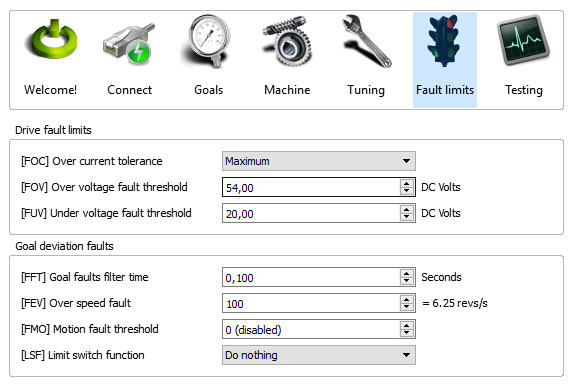
yes I need to access granity because I am going to change the 48v power supply to a 36v power supply and I have to modify FOV and FUV