Force curve not the same… I will try to explain that I mean…
We have 3 variables, not 2. 1) % of braking force in sim (0-100%) 2) foot force which we applied on pedal (0-120kg) 3) travel of pedal (0-5 centimeters).
Try to abstracting from the % in the simulator… Than more force we apply, the more the pedal moves. Yes, in sim it may be less % (what the force curve gives), but it give feeling of “going away” pedal (something like what Emergency brake assist doing on real car). In real race car it should be the opposite, pedal should get tougher (and travel will be shorter) as you increase applied foot force.
With force curve, if you did “exponential” curve, yes, you get less travel of pedal with increasing % in sim at the end of travel, but increasing % in sim will be too fast compared on increasing foot force. In real cars it opposite - you should press stronger to add stopping power of brakes at the end.
And if you did “logarithmic” curve, yes, you get proper (as in real live) increasing of % in sim depending of foot force, but pedal travel will increase together with increasing of foot force, and in real live it opposite - at the and pedal travel will shother with increasing foot force.
Any pedals have force curve, heusinkveld for example… It just not works… They try to solve problem by adding springs with different stiffness. First - the metal thin spring, with long travel and small foot force and small stopping power (%) in sim. And then it completely folds up and stiff elastomer going into action - very short travel with a lof ot foot force and stopping power. But it not works proper too - If the difference in stiffness of is very large (like spring+elastomer in heusinkveld), the transition is very stippled, not realistic. And if the difference is small (soft+hard elastomers), then both elastomers are still working simultaneously and don’t give the realistic feeling too due to elastomers in the kit are very limited in stiffness. Maybe if you could get a set of 4 ten-millimeters elastomers with very different stiffness, it would work, I don’t know… but you are limited to a maximum of two if you want a short enough pedal travel… But Active Pedals don’t have such limitation at all due to construction.
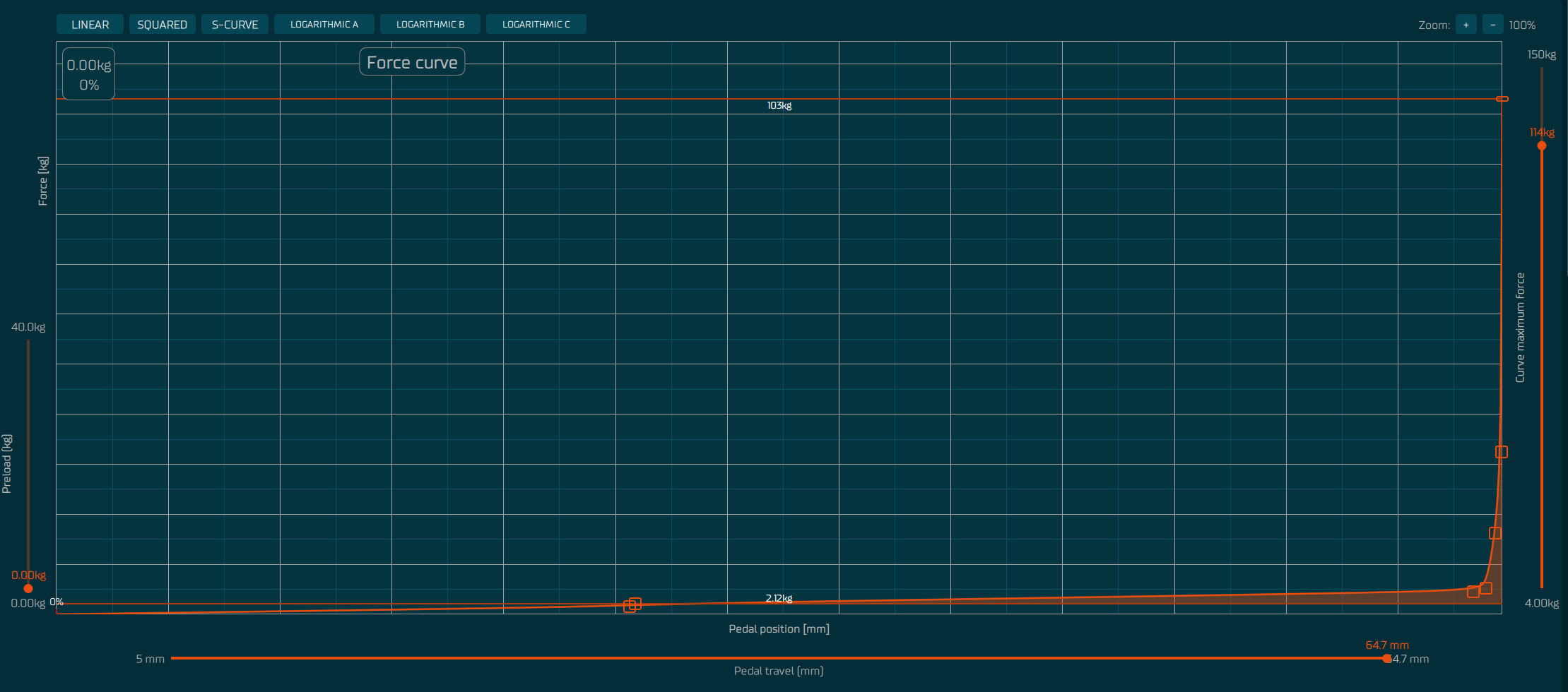
So, what you need - you need a linear “% in sim”/foot force curve, and you need logarithmic “foot force”(x-axis)/“travel of pedal”(y-axis) curve.