when using BISS-C absolute encoders, how one could use absolute encoder position as phase reference? This would enable the stage power on and init without motor movement. I have probably missed something obvious - any little reference can help :).
Granite devices BISS-C wiki states following:
"Support utilizing absolute position information from the encoder
To skip axis homing procedure
To initialize rotary motor immediately (no Phasing needed)"
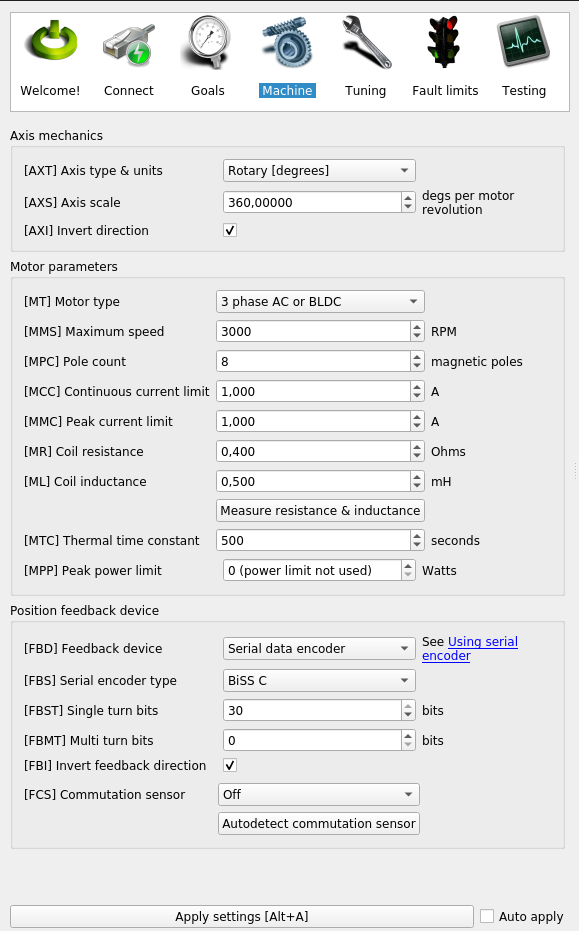
This is what I see under encoder configuration in Granity 15.1. I assume the Commutation sensor [FCS] needs to be on then (even if there are no hall sensors physically) and the Commutation sensor offset will be the offset from 0 position for the BISS-C encoder? Can the offset angle from automatic phasing initialisation be seen in the Granity interface?
If I remember correctly, just pressing the autodetect button does a short calibration cycle that calibrates the absolute encoder counts to the motor phases, sets the [FCS] dropdown value based on the result, and writes the offset to the calibrated value.
Remember to save the configuration to drive flash memory afterwards.