Hi, I have sim-plicity SW20 small Mige 10,000 encoder and 11.2 Simucube FW.
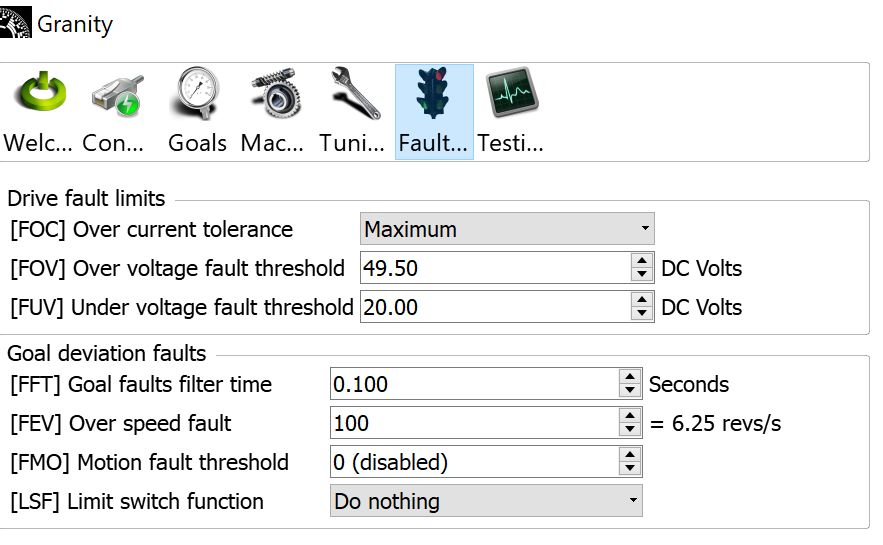
If I run anywhere near 12.86A eg 11A the system reports an undervoltage fault. If I reboot the simucube the wheel becomes stiff and undervoltage is reported.
I’m currently stable on 10A / 9.5A but can’t go much higher though everything seems perfect at this setting.
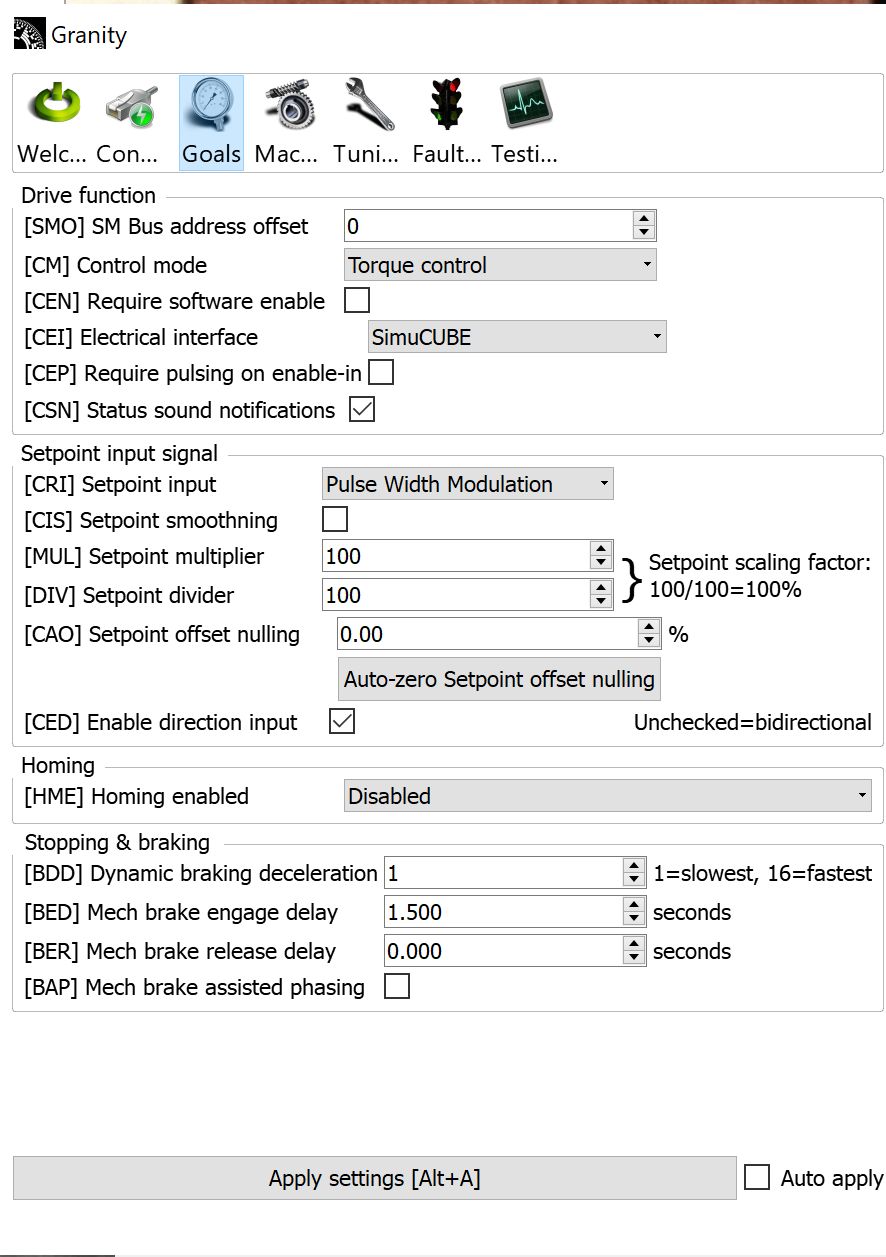
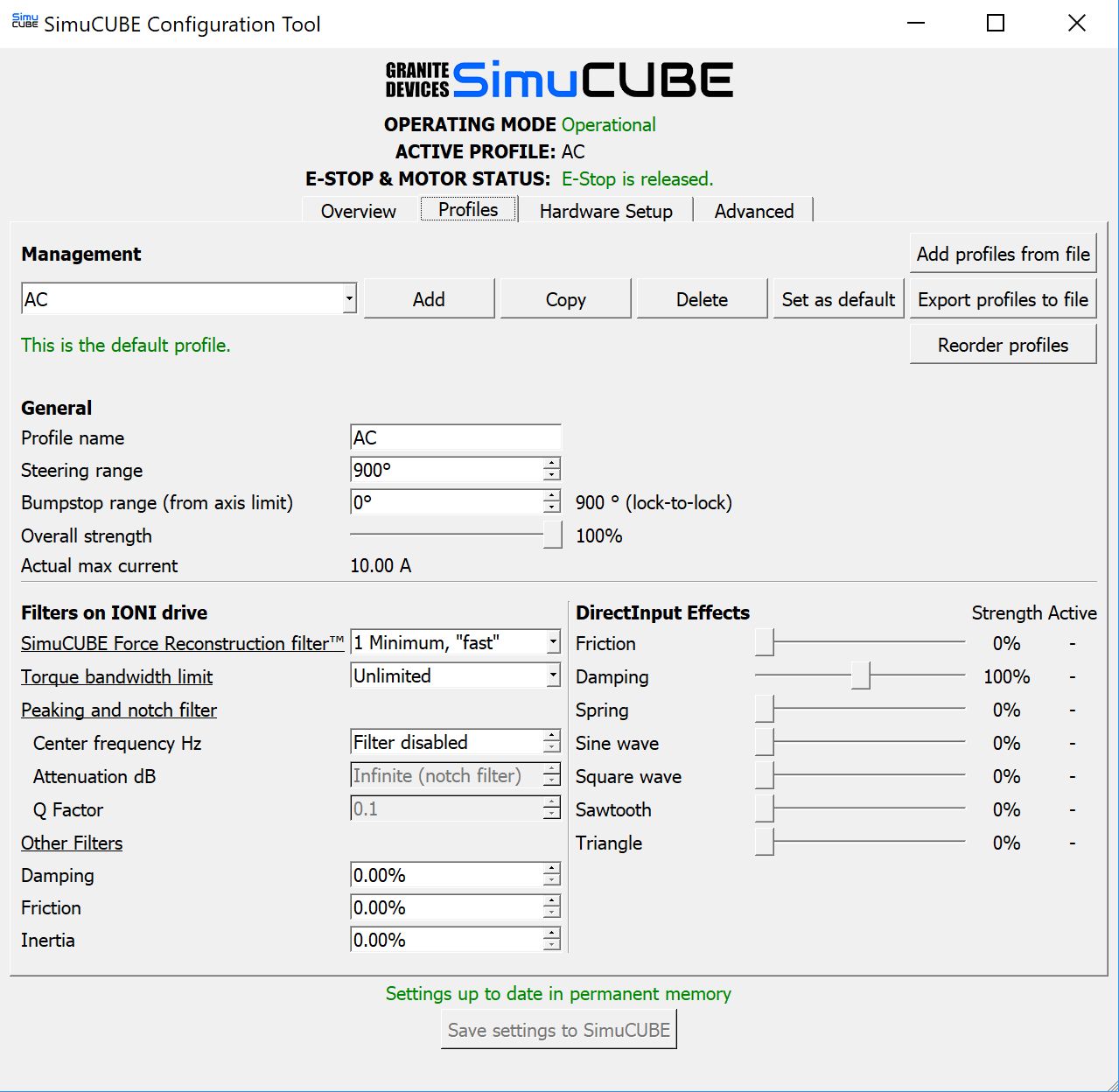
I enclosed the drc which Daniel_Oliver helped me to set up recently - his work helped me to reach 10A max. I have changed MMC and MCC but nothing else. Also screens of my profile and Granity settings.
In regard to the SimPliCity boosting Power supply… From reports and people I have helped the boost function is so short that it will not actually help much if at all in most situations…
That Means that you will experience this under voltage issue if the spikes you are getting form the Sim use up all the available overage… I am not sure how many seconds the SimPliCity unit will allow above 300w
I get this phenomenon at times even with the SDR-480 w/the 720watt boost with the Large Mige at 25A and that has a 3 second boost with a 5 second recharge… The issue arises when the situation uses up the 3 seconds and then another upper wattage hit occurs in recharge as it cannot keep up and drops causing faulting.
If the Max wattage is actually 500 that the PSU can supply at any given time then you wouldn’t really want to MPP to anything less than 500 otherwise you are losing that boost.
Some of the issue as well is that at 12.86A 300Watts is not really sufficient to run the small Mige at higher Specific Outputs which is why you have found 11A is where it still works as that matches the max wattage draw with your Specific output requirements BUT it does limit your top Nm to about 17.11Nm.
The undervoltage fault isn’t connected to any demands from the sim - it happens on boot up. The phasing doesn’t complete and the wheel goes stiff.
I received a reply from Ollie who said it will always work at 300W and that I should increase MPP in 10W increments until it fails and then go back 10W, however it already fails at 300W so I haven’t applied any increase but I found is stable at 290W at which rating everything is perfect in AC and the motor phases fine.
Maybe 290W is acceptable - it certainly feels good and has plenty of torque - it would be interesting to know what MPP other SW20 users are running.
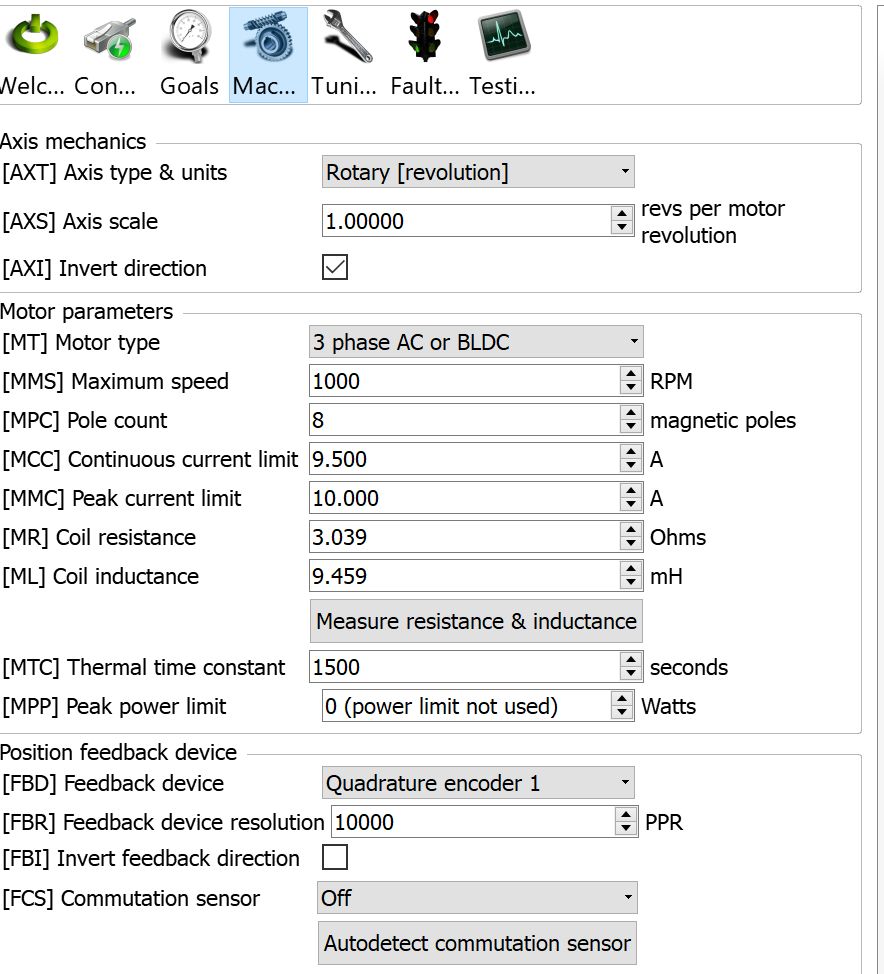
OK check your MCC level in Granity, The MCC is the continuous backup current for the IONI, if this is too close to that of the MMC then phasing can cause non-initialization…
I would put MCC at least 2A lower than what the MCC is right now it looks like you only have it at a half amp lower… try putting it at 8A. and see if that solves your issue.
Thanks to everyone - I spent an hour on Friday night going through tests with Ollie (great guy, really helpful).
My wheel runs perfectly at 290W but, according to Ollie, should be able to run at MPP 360W. He’s taking it back for more tests, I’m pretty sure it’s something fairly trivial like a dud capacitor or something - he will find it
It comes with no MPP set from ollie as far as I know. I have 8 MCC and 12.860 MMC with 0 MPP. If I up MCC it can’t initialize.
Is this supposed to be wrong?
I also started with no MPP setting, don’t know why - it would be really interesting to hear your results from some more tests.
With no MPP I couldn’t achieve over around 10A / 9.5A - it was recommended by Ollie that I set 12.860 / 12.859 at MPP 300 - keep increasing by 10 until it failed to initialise. It failed at 300 but one step down to 290 and it worked. The wheel feels great at these figures but it should indeed be capable of more, somewhere near MPP 360W according to Ollie.
Maybe set MPP 300 at your current settings, check it works ok and go up in 0.5A increments (MCC) first, testing at each setting - see if you can get near 12.860 / 12.859.
If you can then you can increase MPP in increments of 10W until it fails, then drop back 10W
Some disclaimer - I’m not an expert Let us know how you go.
DId you use the contact us on his website? I used that months ago with no reply, and I haven’t gotten a reply since I wrote in yesterday which seems a bit odd for ollie.
MCC does very little in regard to Direct Drive Systems. It is a Fall back Amperage should something occur with the system so there is no need to have it close to the MMC, in fact it can cause initial Phasing errors as the IONI goes through tests of the system to determine if it can handle what it asked of it. During this it wil generally fail initialization if the MCC and MMC are too close for the Power supply and everything else being used… In the .drc files I have put up on iRacing for the major combinations I use the POS Max Amps for MMC and use the POS Converted Continuous Amps for the MCC and there have never been issues.
With MMP it is good to know that this is a wattage draw algorithm for limiting the IONI so it is estimating the draw it is requiring and adjusting as such… That means that this number could be a little different than the actual draw occurring at the PSU. Having this in place though helps limit what is drawn from the PSU to make the system more stable if the PSU is possibly undersized for the servo.