I recently bought a used Simucube 1 with a small Mige and a biss c encoder.
When I start up the Simucube Configuration Tool and Granity, everything seems fine.
Once I load up any Game, the motor gives me very high force feedback every 45° of rotation off center.
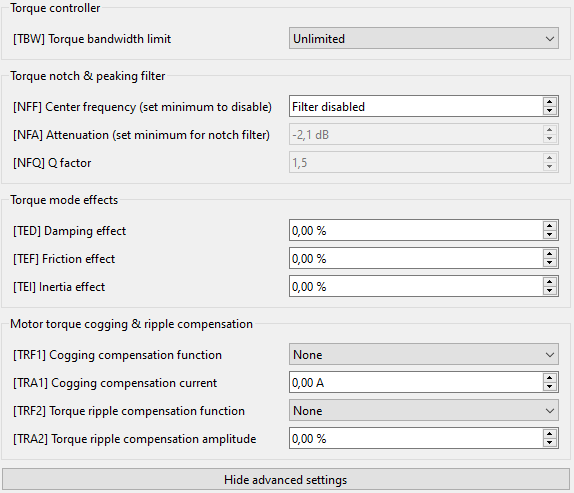
These Bumps can also be felt without a sim, if I turn up the Values for Damping, Friction and Inertia in the “Other Filters” Section of the “Filters on IONI drive” Tab in the Simucube Software.
The bumps also get more severe, if i accelarate in game, which leads me to believe that it has to be a software Issue of some kind.
I’m using the newest versions of Granite and Simucube configuration Tool.
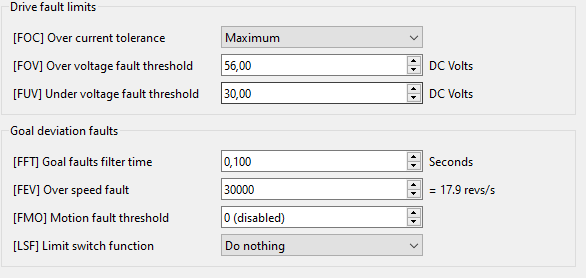
I also used the .drc-file provided by the original reseller of the kit, however when used it complained, that the “over voltage fault threshold” was set to low.
Probably there is something wrong in the DRC file then, in such way that it doesn’t match the physical configuration with regards to the motor and encoder you have.
Does the wheel rotate at a matching rate compared to real life in the Configuration Tool?
OK. So did you have to mess around with the wires on the green motor power connector block on the Simucube when you installed the unit?
That might be wrong in the DRC file too. Easiest way to fix would be to toggle the AXI Invert parameter in Granity (if it is now checked, make it unchecked, and vise-versa). Report if this fixed the issue.
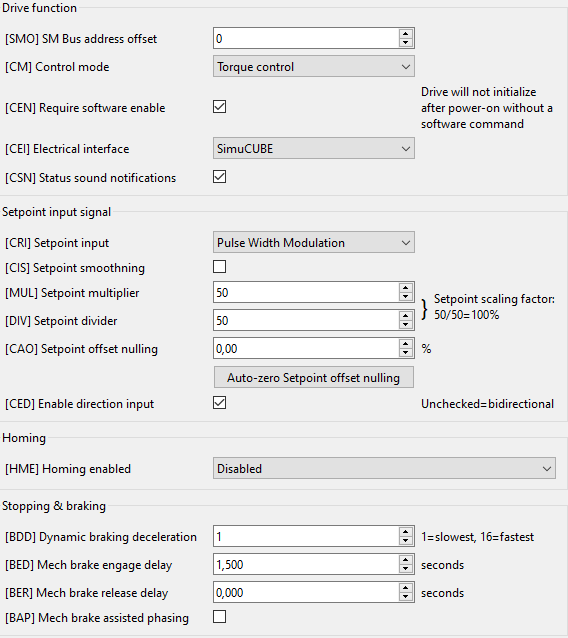
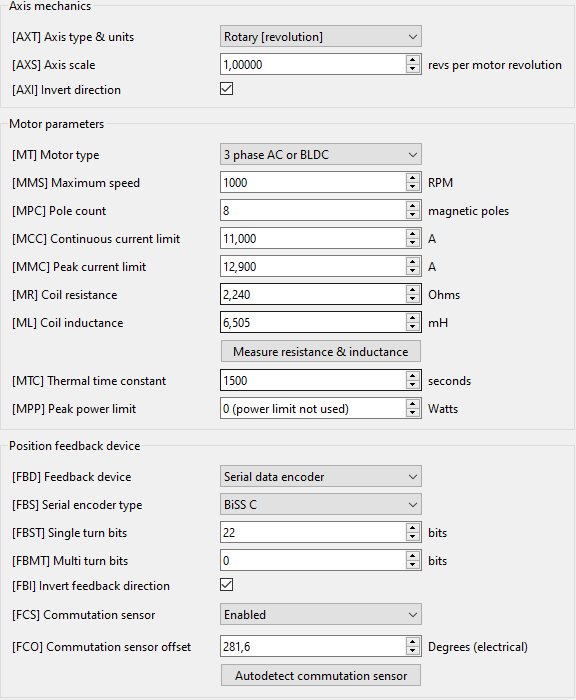
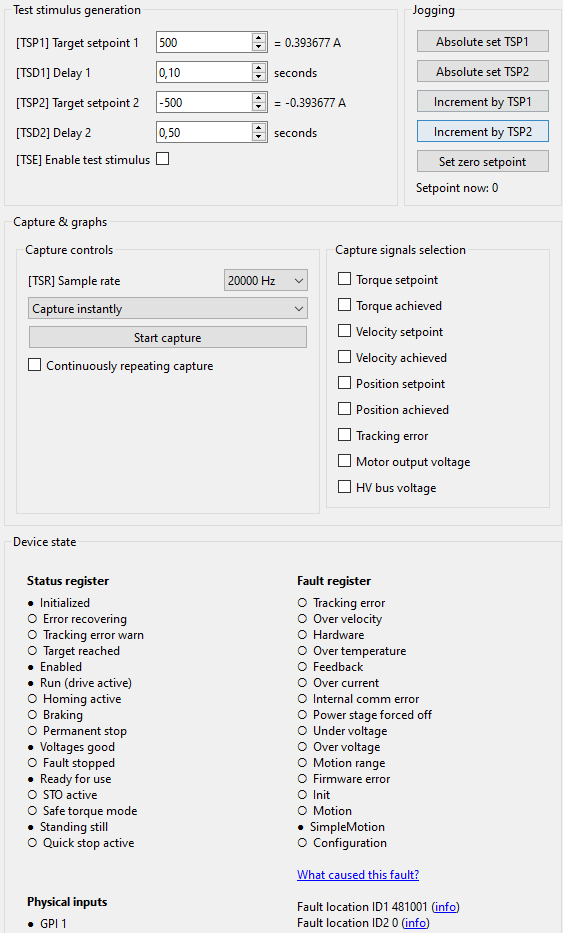
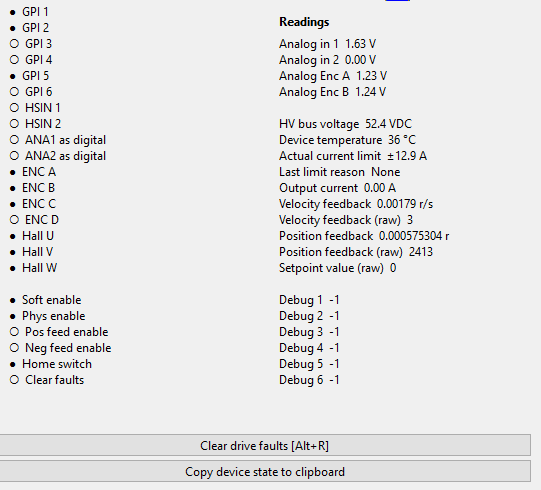
Sure, here should be all of my Granity settings:
These are the settings provided by the reseller, with the only change from that being the [FOV] being set from 53 to 56
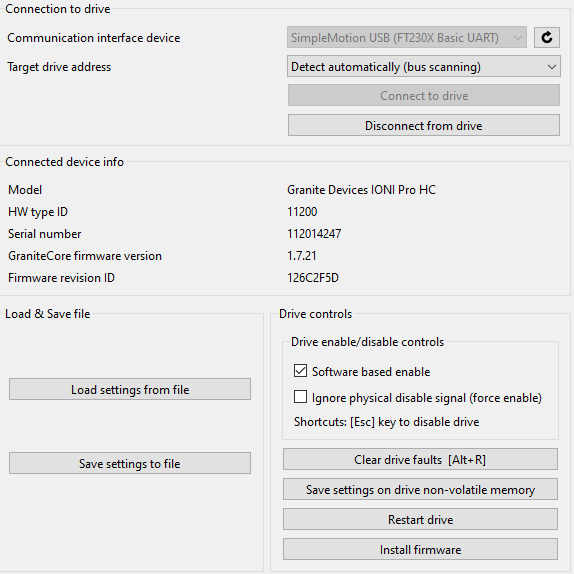
maybe the problem lies with the version of ioni firmware because you have 1.7.21 and it clearly states : * Do not install this in Simucube use case
An issue has been noted with this firmware version with Torque mode in Simucube use, when an absolute encoder (such as BiSS-C) is used. We recommend to use 1.7.20 release in Simucube.
try 1.7.20 and see if that helps because i don’t see something wrong in your settings tbh
The PSU voltage is suspciously high, and that FOV setting leaves the IONI servo drive only one volt or so of headroom to work with to try to dissapate the excess voltage. Is there a reason why the voltage is so high? What kind of PSU is it?
There is a voltage adjustment potentiometer on that PSU.I would advice to put the output voltage back to 48.0 V, and after that, the FOV parameter in Granity to 50.0 V.
But that really doesn’t explain why there is a notch at 45 degrees.
However, have you tried to disable the commucation sensor, so that the phase search routine is run on device startup? This would eliminate the change of the encoder having been knocked out of the saved position.
Yeah, it is as if the current and therefore the magnetic field is not correctly aligned in the motor, causing the notches. More current, more notch-causing magnetic field.
As we can’t see anything outright wrong in the settings on IONI, my mind would start looking for wiring faults, especially with regards to motor phase wires. If some of the phase wires do not carry current enough to the motor, it would cause the notches.
If that is not the cause, then maybe the IONI is broken (some type of mosfet failure?) but it is very unlikely, we have maybe seen one in Simucube use case over these 6+ years.
Simucube fault would be unlikely, as the Simucube in this case is just a board that carries the current from IONI to the connector for the motor.
So afaik the wiring in the cable from the Simucube board to the motor might be the issue.
The markings on the pcb do not align with the markings on the cable/sc-connector.
The Current pins on the board are currently connected with these pins on the connector:
1-4
2-3
3-2
GND-GND/1
How should the wires be connected, or could this somehow be the correct way to connect them?