I have an argon unit sitting here collecting dust since 2015, it’s a Dennis Reimer kit. I had a thought about running it on one of my demonstration cockpits. So I contacted Liza from Mige and ordered a Mige 130ST-AM10010 with Bis-c encoder (YD28J7Za-E 32-11).
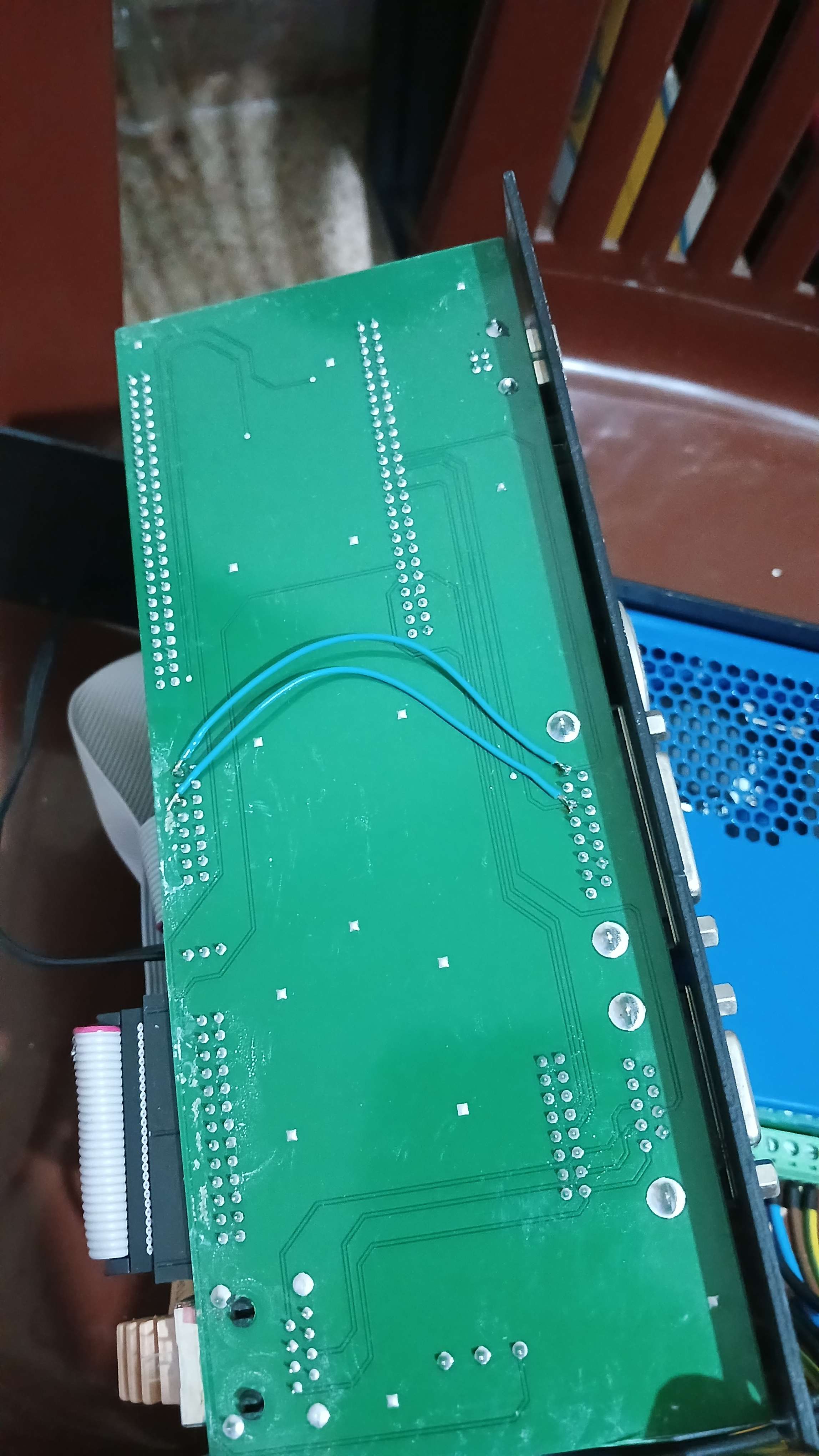
Now instead of the regular 12 pins, this encoder has only 7 pins. All I know and remember is that this unit was used previously with a Mige Motor. This Reimer kit is composed of Argon Drive a 24V PSU a large breaking resistor, and a discovery board coupled with a subboard created by Dennis Reimer. Connections are an NLT4M for power, a 15-pin encoder terminal, a 9-pin E stop terminal, and a USB-B connector.
My question is the following:
Do I need to rewire anything to run this Motor on my Argon?
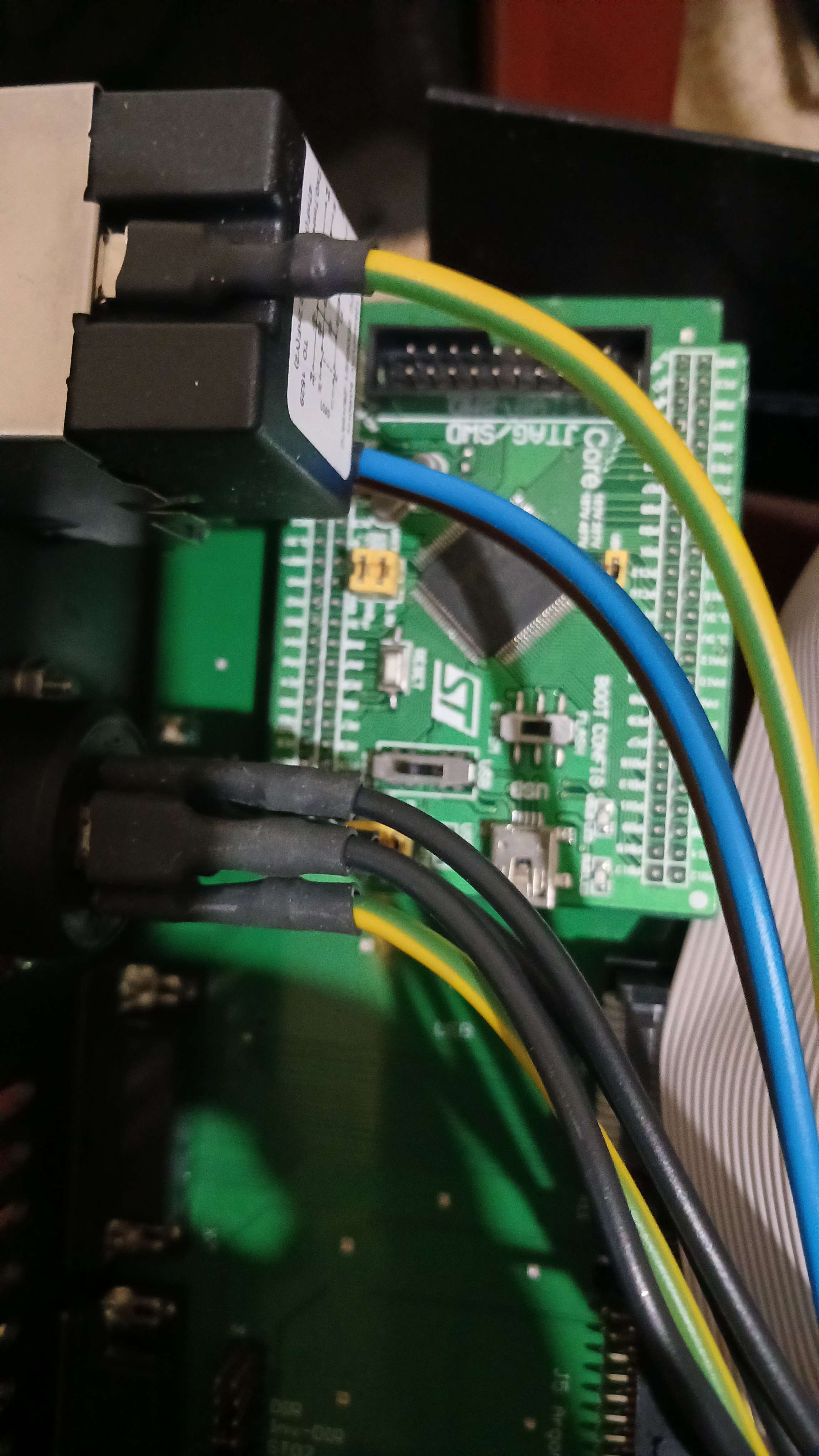
Would the unit do the starting phase without an Estop connected? The Estop was somehow damaged and I hardwired it using 2 jump wires to the 2 and 6 ports respectively.
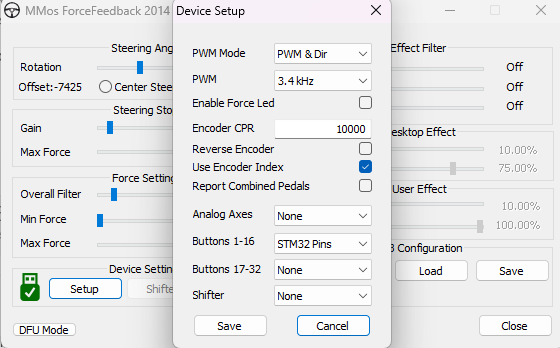
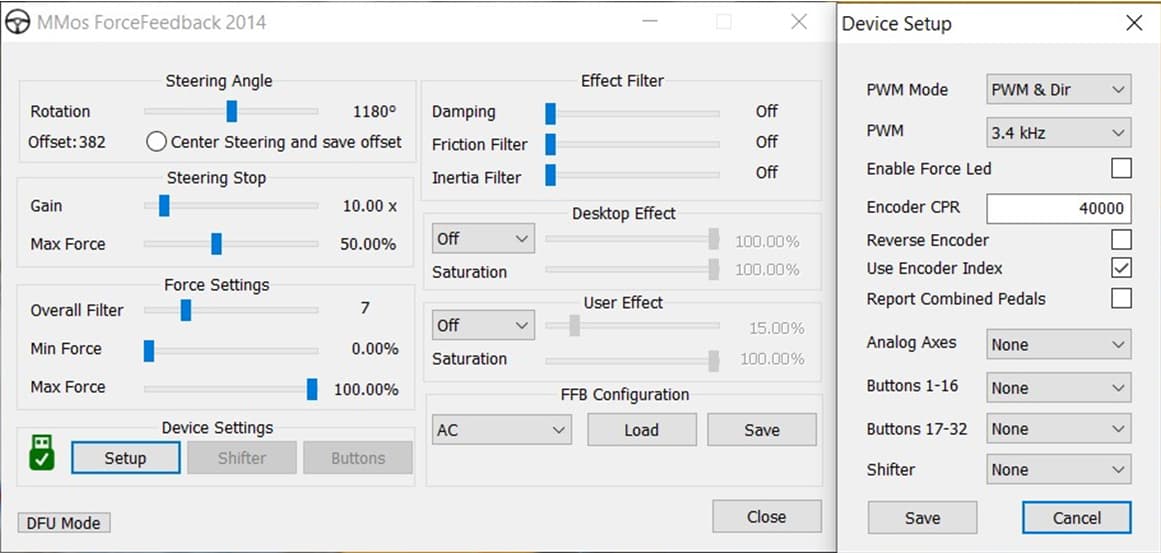
When connected to the PC the Blue LED on the sub-board is solid while the red one is flashing and the MMO’s software recognizes the kit and I do have a small jerk left and right on the shaft. Trying to center the wheel and rotate the shaft manually would not end in a soft lock despite loading a profile of 900 DOR.
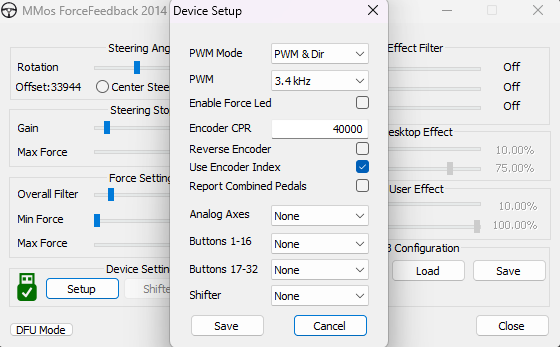
The MMO’s version is 0.0.9.1 firmware model around January 2015, PWM Mode to PWM and Dir, 16.8Khz, Encoder CPR 60000.
I did hook the controller up to a brand new Mige 130ST-AM10010 DFP model that comes with the VRS DFP for testing (YD28J15Z-E 22-11) 15 Pins, Yeilding the same result, a jerk left and right and nothing.
Am I missing something? isn’t this supposed to be plug-and-play?
Note that the jumper wires I did for the Estop are different from the ones in the picture above, these were soldered previously to the back of the board.
and I also think that our Argon firmware never had support for BiSS-C encoders.
I don’t know if someone developed the open source user side firmware for it that would have that support but I also think the servo driver side would need support in order for the servo drive itself to work.
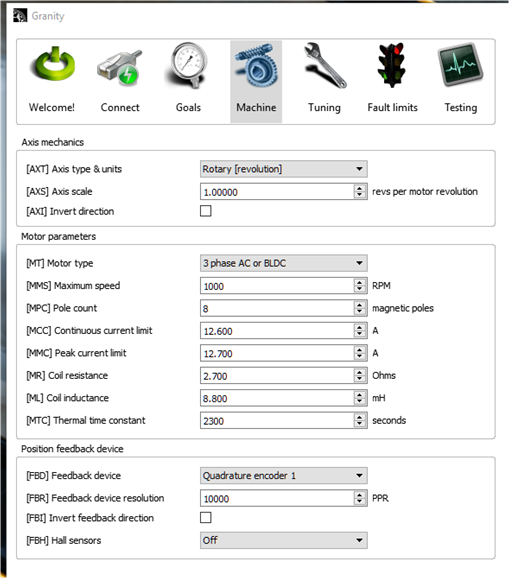
I have replaced the encoder on my small mige to a quadrature signal incremental using Argon drive with custom Reimer board.
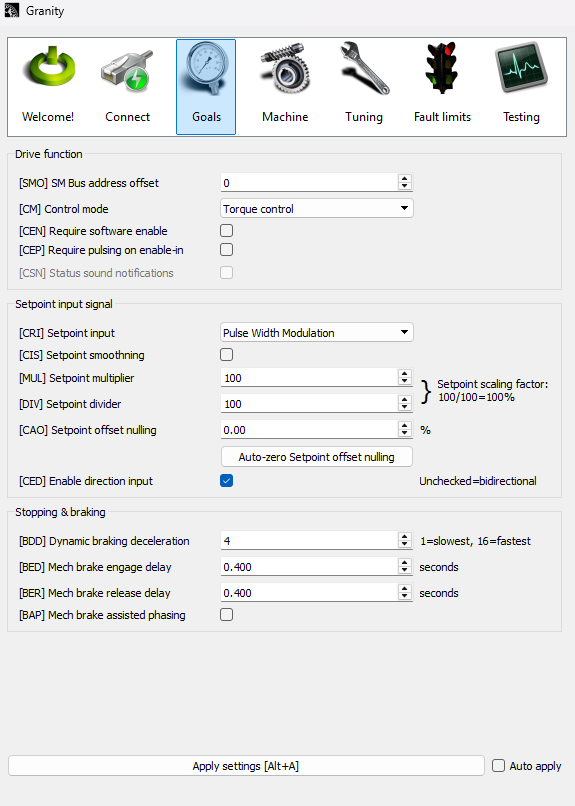
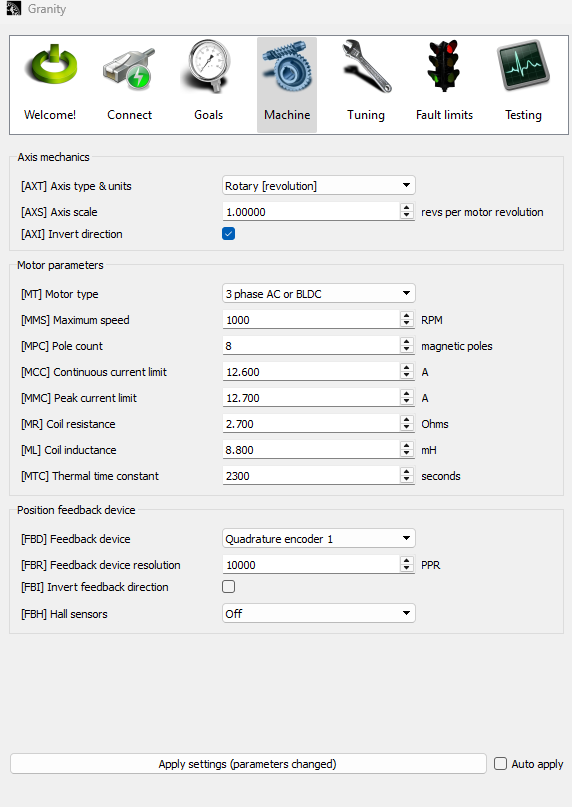
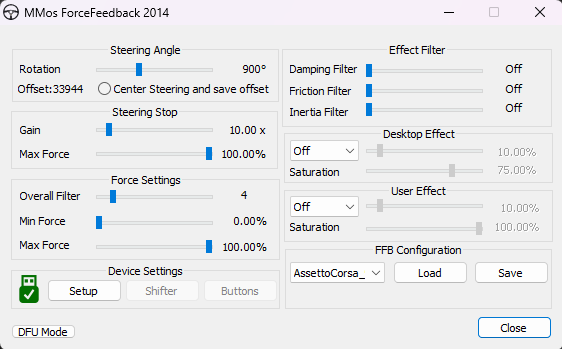
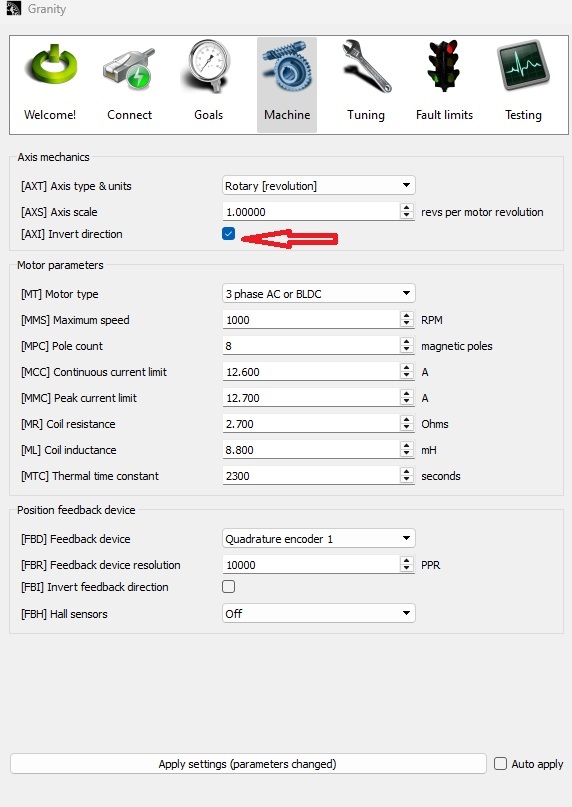
Using the below settings (Picture attached).
MMO is in the green and solid blue light on Reimer controller box.
Now the motor works and recognized in windows and in game (Assetto Corsa CM) but when it reaches one side of the bump stops the motor locks and start vibrating. And completely locks no movement while the other bump stop is fine. The only way to get out of the lock is to recenter it. Can someone tell me what I’m doing wrong?
Made sure all parameters are correct based on your suggestions and MMO’s parameters are correct. The problem remains everything works perfect until you reach the bumpstop and the motor locks and the red light becomes static until I hit recenter again. Find attached all of them pictures.
No I’m not in the sim even I’m in content manager controller axis section. Whenever I reach I bump side usually to the left the motor fully locks and the red indicator becomes solid.
have you tried other sim ?
Yes, the same happens in iracing when trying to set up wheel
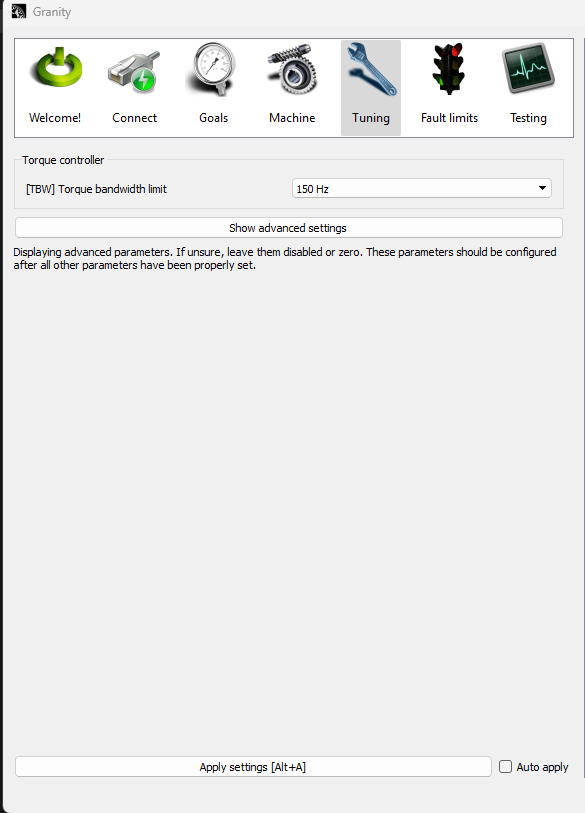
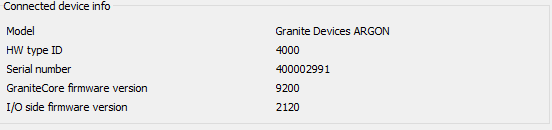
what argon firmware are you on ?
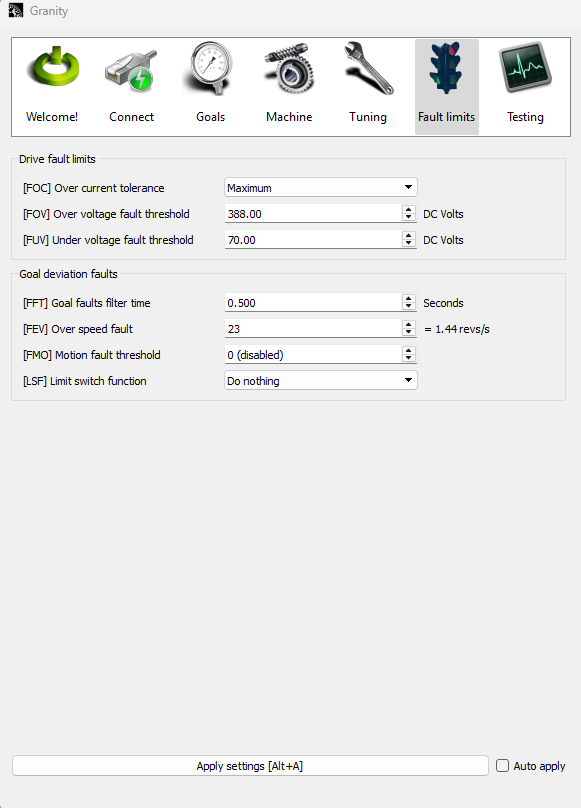
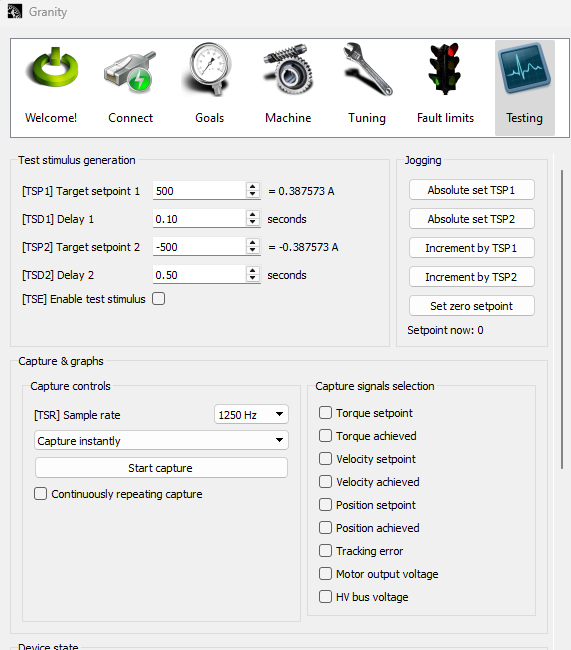
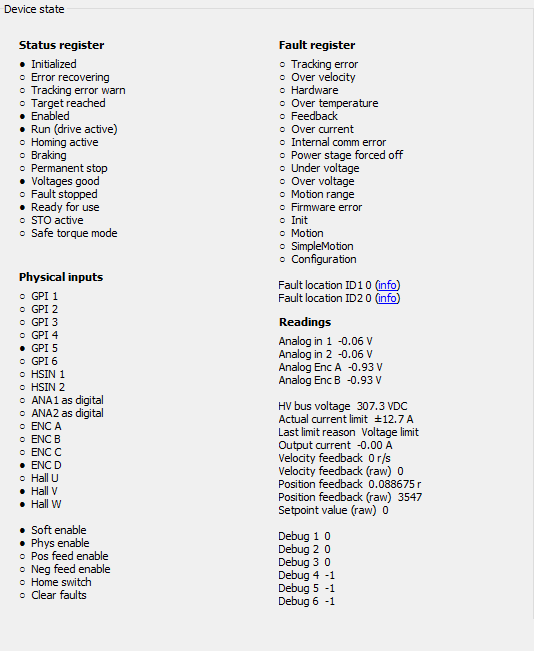
Granity picture attached. It’s an old model
the cables you are using were from the same encoder correct ?
I’m using a data cable that belongs to another IONI Cube IX with Discovery board combo D-Sub 15pins the wire I got with the encoder is not treated with a terminal (If you have a drawing I can refer to I would install a 15 Pin DSUB on it)
Thats suppremely dangerous to have a servo motor loose on table like that!
Probably you have AXI Invert setting wrong, or the encoder CPR settings are wrong. Does MMOS steering angle limit feel right? iRacing could be right due to its great calibration even if the underlying settings on the hardware are wrong.
yes, its that parameter. But only, if the FFB is notchy also in desktop when no sim is running and you turn against a centering spring (did MMOS have one? I don’t remember.)