For efficient support requests, please consider using the template below. Fill-in the (blanks) and provide additional info when necessary. Thank you! Best regards, Granite Devices team.
I have a question regarding (product) regarding (issue).
My hardware configuration:
-Argon
-Mige 130ST-M10010
-Latest FW
Problems arise when:
-Made a mess for myself and thought that Simucube software should work on an Argon drive, managed to flash the argon and load SC FW on the drive,which didn’t work, idiot me, even said with big red letters that the Simucube didn’t work on the argon drive. Anyways.
After much faffing around I’ve managed to get everything flushed and loaded the proper Firmware for the Argon and the Disco board, so now the Argon firmware is on and read by Granity, and the correct MMoS firmware is loaded on the disco board. Managed to source a drc file for the motor, and set that up, all settings double checked by Tomo from SimRacingBay.
How it behaves:
-Wheel turns on and phases as expected, can center wheel and get offset value in Mmos, loading up RRE, can set axis and wheel will turn, but the FFB will not work, and wheel gets very notchy and heavy to turn when ingame, its like I have to force it over big tops, and then falls down into next valley for then needing to be forced over next top again.
I’m at loss to what it is, have searched all over internet, and can’t find anyone with the same experience.
I have attached following files:
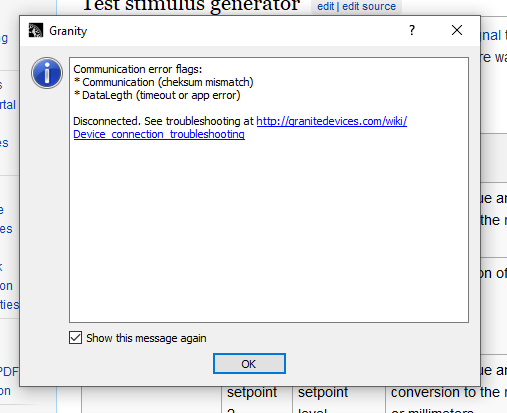
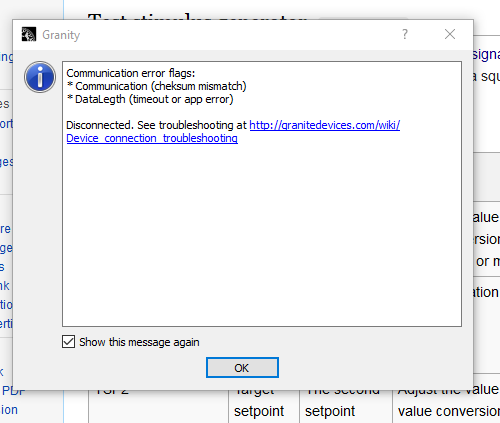
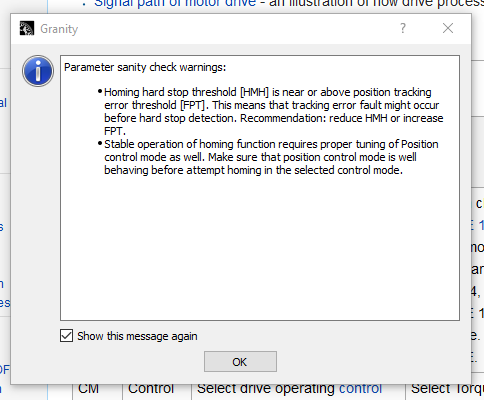
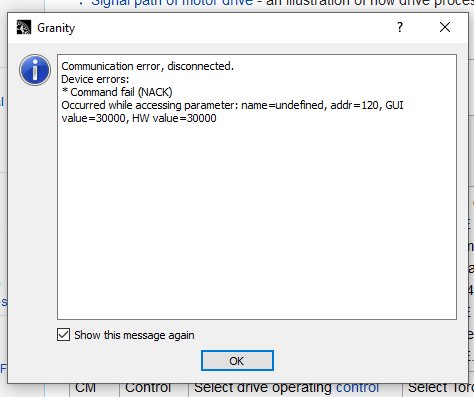
I am getting these faults in Granity, but don’t know what to read of them
-(consider adding saved Granity configuration file .drc)
-(screenshots)
Thanks for any help you can give
Best regards
Audun