I have a question regarding the Argon driver using linear drives.
I am having trouble configuring the feedback/encoder values due to my drives and encoders not giving me quite the information I need. In particular, I am trying to find correct values for the mm/rev and PPR. I know that the encoder is an analog, sin/cos encoder. I will list all of the information I have regarding my servos below:
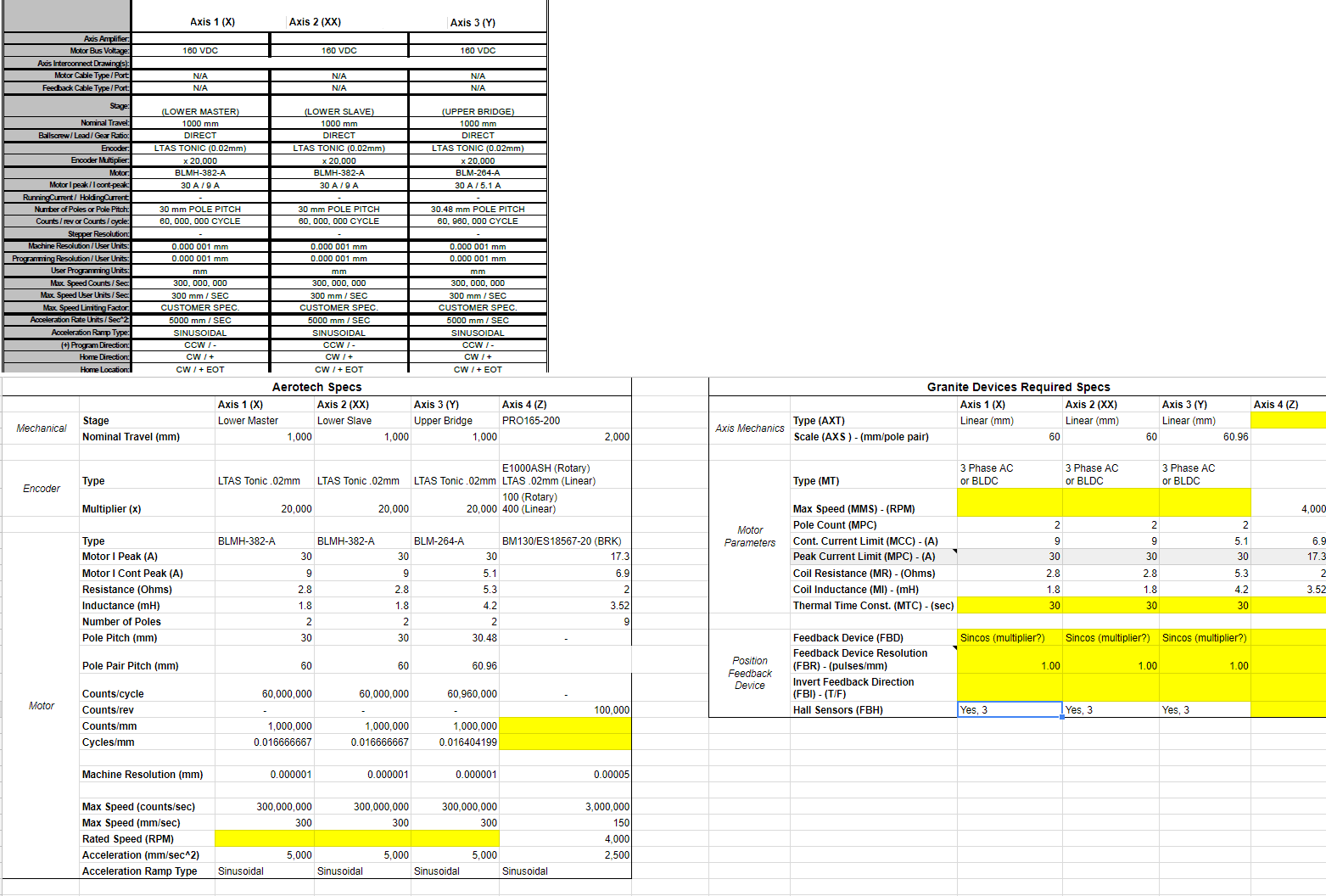
60,960,000 counts/cycle
1,000,000 counts/mm
Encoder multiplication factor = x20,000
1 cycle/rev
I tried using 60.96 mm/rev, but I was not sure what to use for the PPR. During my testing I was getting a combination of tracking error faults and motion faults, and the linear drive would not move much more than 20-30cm.
Thanks for the help, I feel like it should be really basic, but I am new to this and I can use any help I can get!
Hi Mazo
Please reply with the model details of the linear drive or preferably link to it’s datasheet.
Argon has sincos interpolation factors of 1, 16, 64, and 256. What do you mean with the x20,000 multiplication factor?
Kind regards,
Esa
Here is all of the information that I have. The first image is the spec sheet that I received with the machine and the second is a lot of the same information, as well as the settings that I am trying to put into Granity, but am getting initialization faults. The calculations that I did, using the info from the wiki led me to a PPR of 1.0, but the minimum PPR on Granity is 16, so I as not sure what to enter. I tried using x64 with a PPR of 64, but that caused all kinds of initialization errors and communication errors when I tried to save the settings to the non-volatile memory.
Additionally, here are links to the datasheets for the drives, but not the encoders:
https://www.aerotech.com/media/3197904/blm-data-sheet.pdf
https://www.aerotech.com/media/3198492/bm-series.pdf
Again, I apologize for my lack of understanding. I very much appreciate your willingness to help!
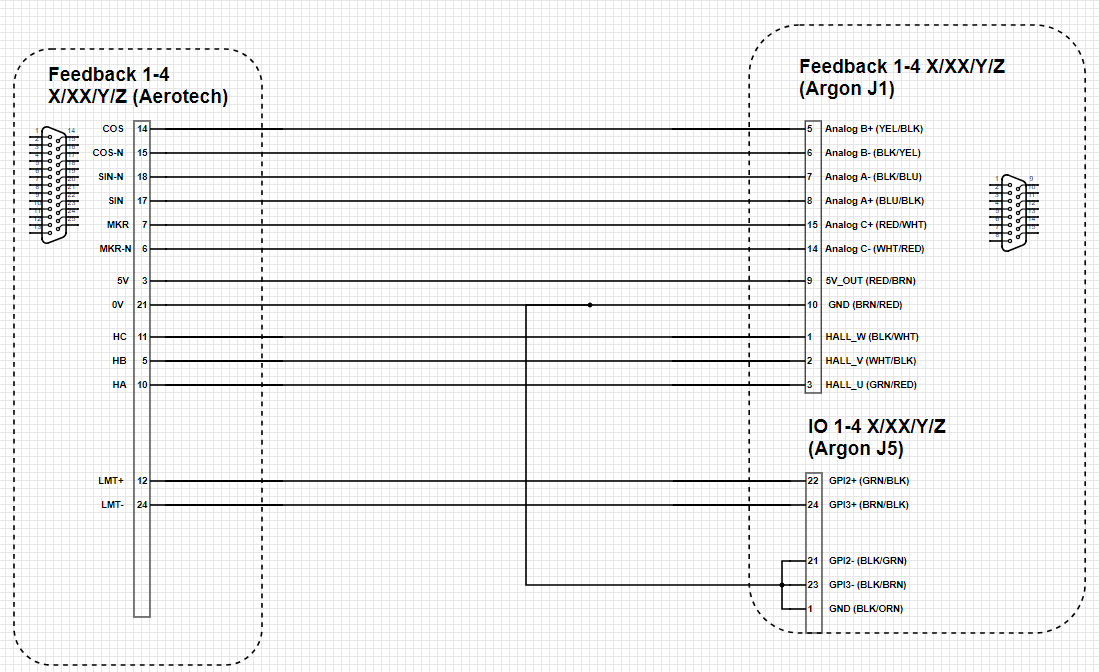
Sorry to add on to my post, but I wanted to clarify the wiring input/output from my servos to the Argon. Here is a simple wiring diagram that I made. I am not 100% sure that the connections are correct, because I have been getting extremely inconsistent movements.Thanks!
Hi Mazo
Thanks for the extra info. The wiring looks to be ok.
I’m assuming you have this Renishaw Tonic encoder, model Ti20DK.
http://resources.renishaw.com/download.aspx?lang=en&data=92566&btn=1
According to the datasheet, the encoder has 0.02 mm (20 um) with internal 20k interpolation factor. The interpolation also hints that the encoder outputs incremental digital pulses. If so, Argon should be configured to use quadrature encoder, and not sincos. Plase verify the output of your encoder.
If the output is the 20 um sincos, then the PPR value of the encoder comes to (60.96 mm / 0.02 mm) * interpolation -> e.g. 3048*16 = 48768.
If possible, please check the output type with an oscilloscope and configure the Argon accordingly.
Also, you can check the position feedback value in Garnity/Testing/readings, and check the difference between two measured points. This would give you some reference for the encoder accuracy. The reading is in CPR, and PPR is CPR/4.
Please note that Argon has limited input frequency for both incremental and sincos encoder signals. Details can be found here:
https://granitedevices.com/wiki/Argon_specifications
Kind regards,
Esa
1 Like
Thanks for the detailed response. I will hook up the encoder to an oscilloscope next week to determine whether it should be using quadrature or sincos input. Once I get that figured out, I am sure I will have some additional questions, so I will be sure to reach out then.
Thanks again for your help, it is so very much appreciated!