My hardware configuration:
-(drive type) Argon
-(motor type/model) AC servo 8P, YASKAWA USAFED 20FB2T, 1.8KW, 15A, 1500RPM,11.7Nm , 8 counted poles
-(drive firmware version) Latest
-(other details)
Problems arise when:
-(describe how/where it happens)
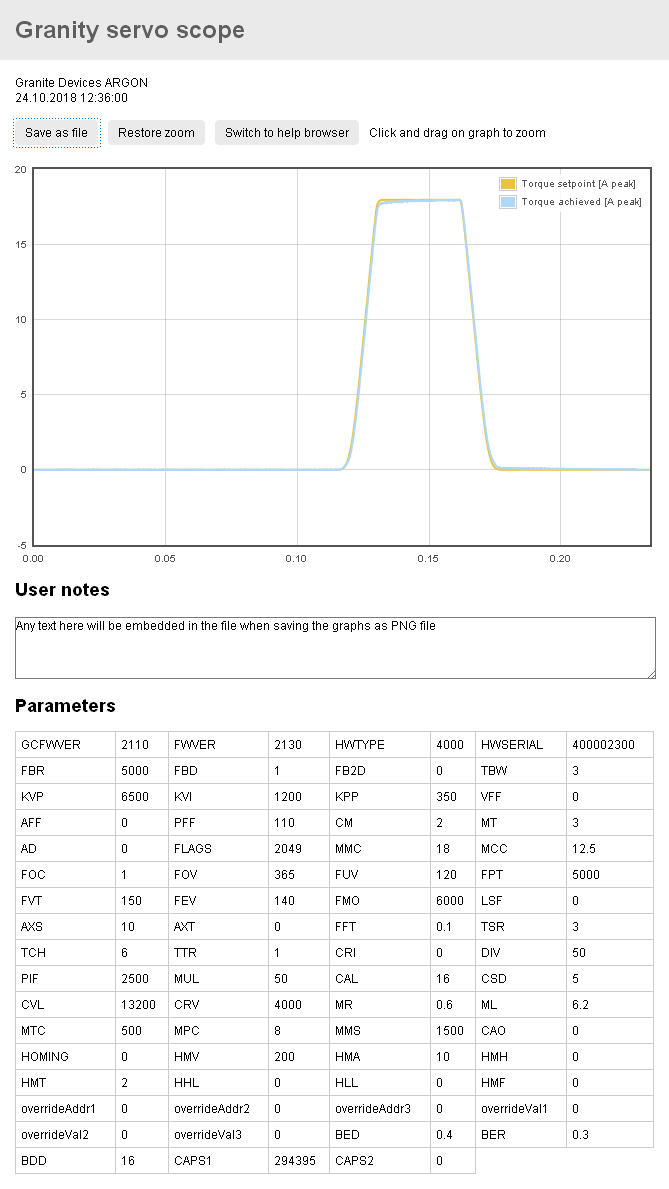
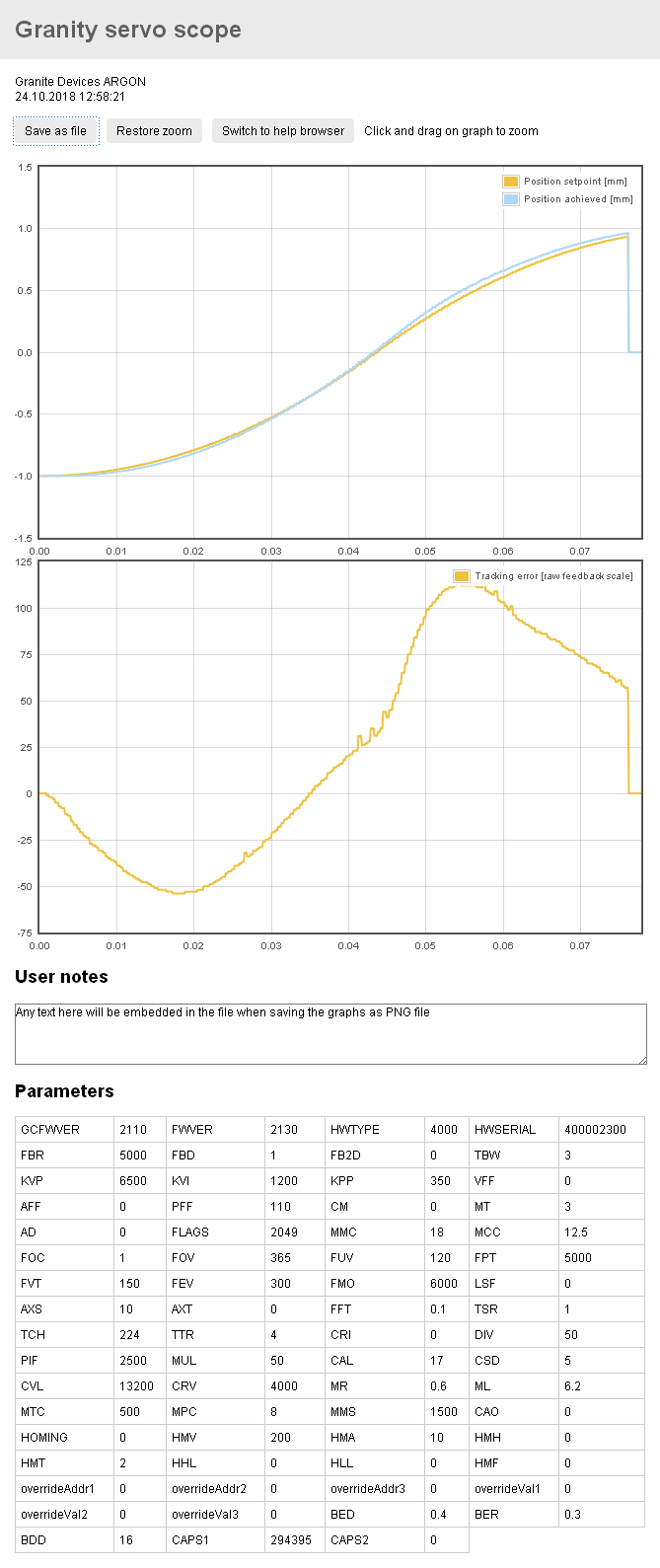
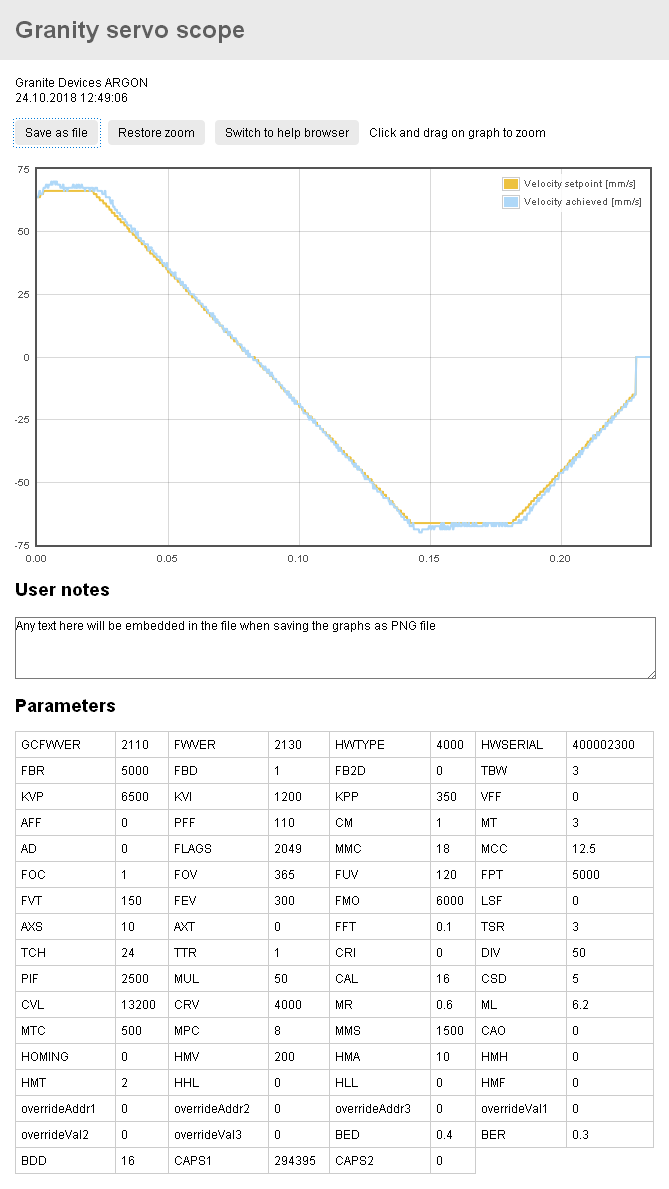
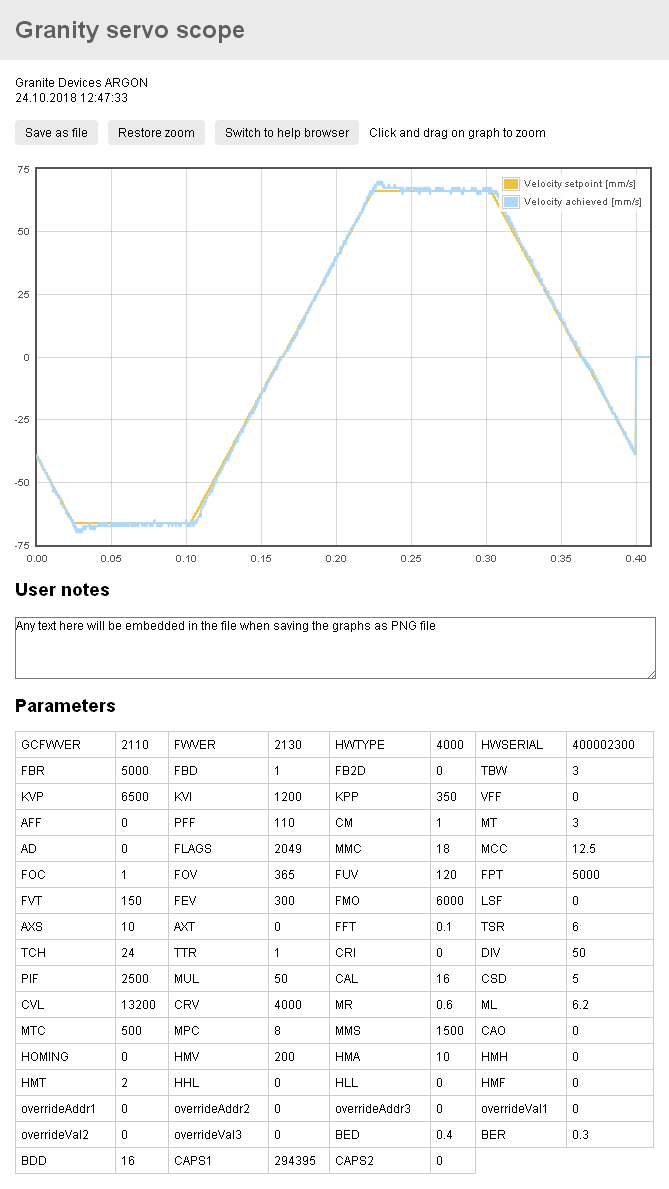
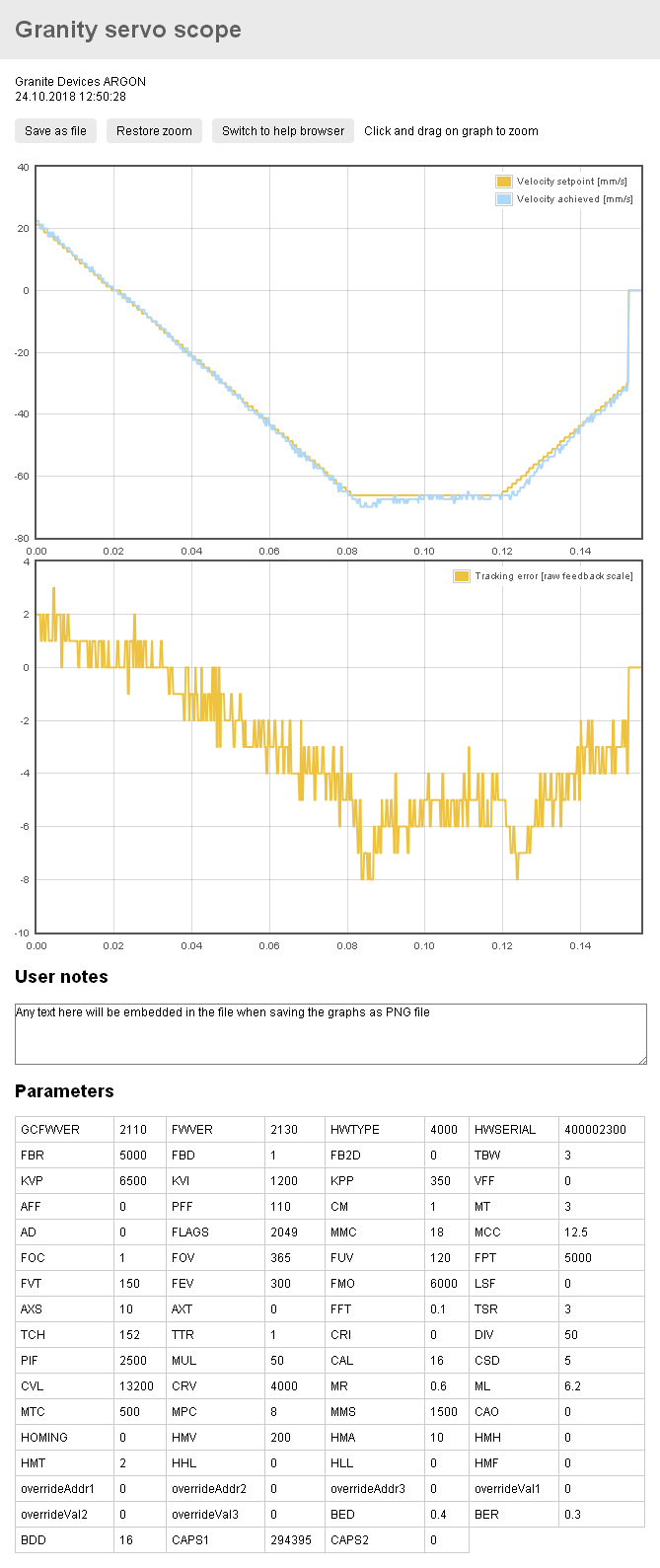
Tracking error above 150 raw pulses at 100mm/s2 with max 5A current .
At 500-750mm/s2 tracking reaches 400 raw pulses (5000PPR/encoder)
How it behaves:
-(describe system behavior)
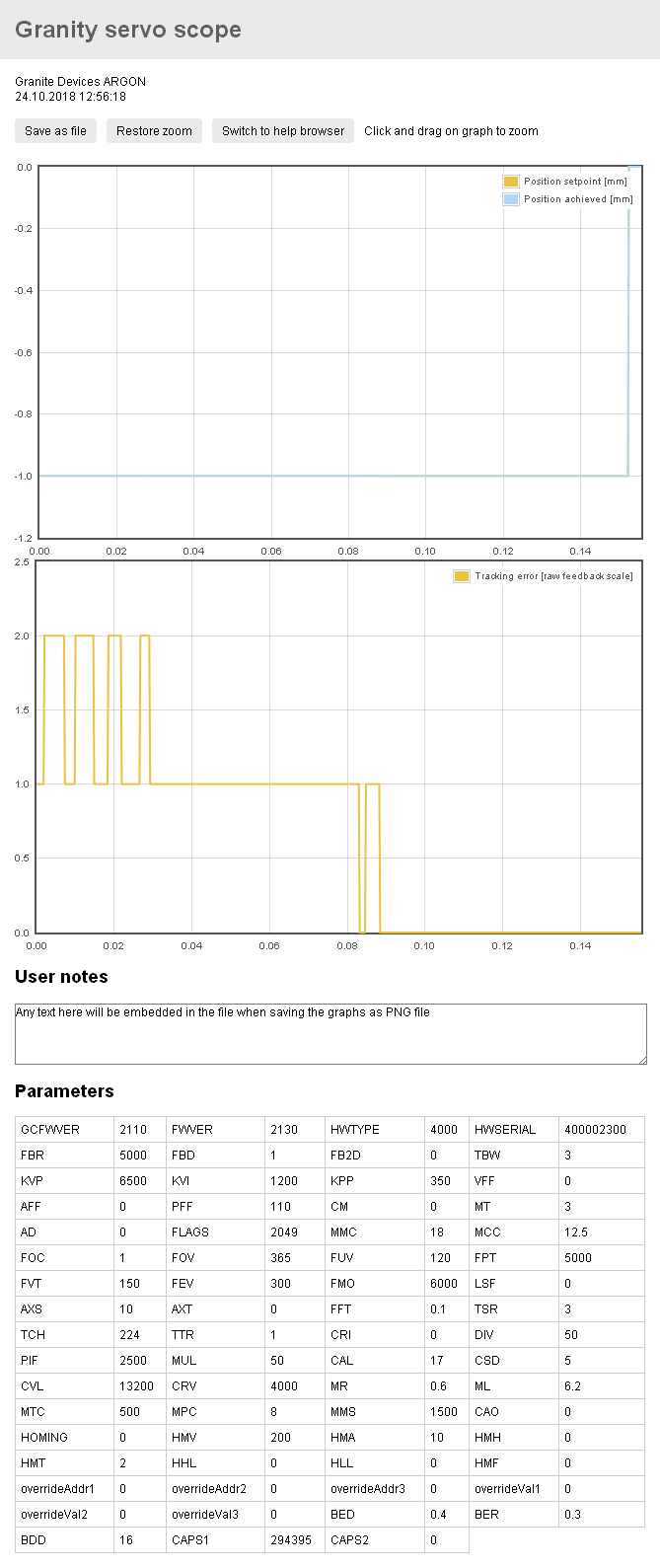
On the table position error is big regardless P I settings
Increasing P above 4000 will produce oscillations.
How I would expect it to behave:
-(describe)
Have better position tracking as it has enough current reserves .
At 100mm/sec2 is using only 5A with 150 pulses error in position tuning with Granity .
I have attached following files:
-(consider adding saved Granity configuration file .drc)
-(screenshots)
I also would like to share that (additional info).
Note: you can tag the best answer as solution. This helps others to find the solution to the same question.