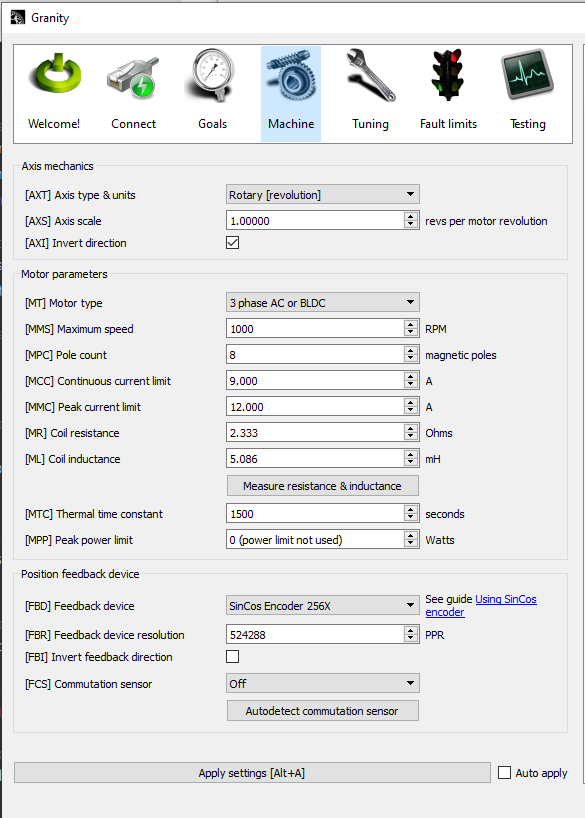
I have a small mige Simucube system with the sincos encoder.
Recently I updated the firmware to 1.0.40 from 1.0.25 and all appears to be well, but I do see an obvious difference in the wheel when it first powers on.
When it turns on the wheel phases, then does its happy beep sequence. After that I need to rotate it to set the center position. When I do that now, there is no resistance - the wheel is light and spins freely.
Previously, there was a slight resistance until it beeped at the center point.
I’m curious why that changed, was it something that was intentionally removed in the firmware - or is there a setting somewhere in the configuration tool or granity that controls that behavior?
To try and clarify, the difference in resistance is only after the phasing stops when I need to rotate it to find the index point.
The way it used to be, there was a slight resistance until it found the center - then it would beep, the resistance would stop and the wheel would spin freely.
The way it is now, the wheel is light and spins freely after phasing. Its not really a problem either way but I’m curious about why its different now.
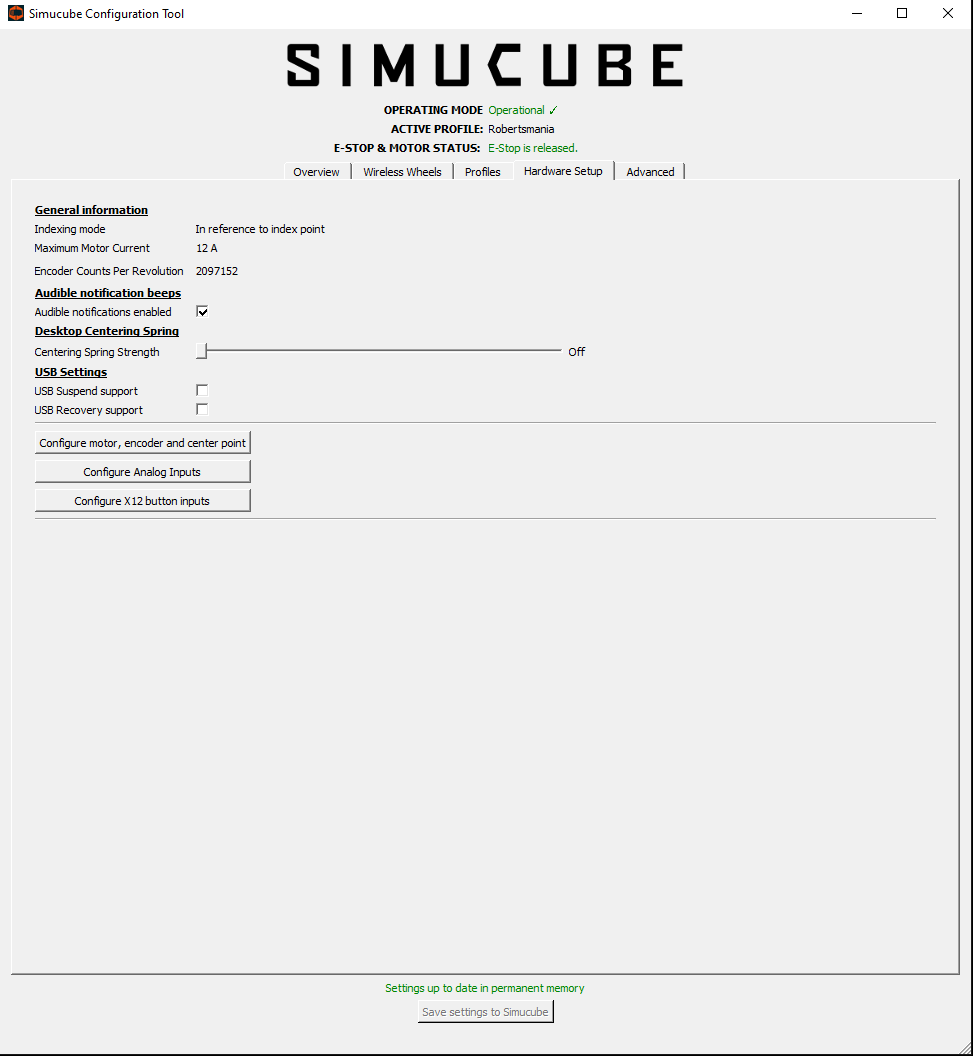
Just to close the loop on this, I did go back and re-run the Motor, Encoder and center point wizard on the Hardware Setup tab again.
Selecting Use existing IONI configuration as-is, indexing as Manual, in reference to encoder physical index, and letting it go through that process of phasing and setting the center point. None of this is different from what I had been using.
But now it is back in the old familiar behavior and all is well. Now when the wheel powers on, it phases and then I rotate it with a modest resistance to find the index point and then it loosens up and spins freely. The in-game behavior is unchanged.