Whilst the QR hub for the Simucube is pretty good, what would be really useful for those of us who have wheel rims from previous equipment would be if an adapter could be provided, and included in the kit, so that an alternative QR hub could be easily fitted.
My preferred QR hubs are the NRG gen 2.5. I had these fitted on the wheels for my ECCI 7000, and I could hot swap between wheels very easily, and remove the wheel to exit my cockpit.
I’m finding that the Simucube QR after using the wheel for a while requires some force to loosen the wheel so it can be removed. Very secure, but hardly Quick Release.
These are aftermarket Automotive products for road or competition use, not just for Sim Racing.
You need this
https://www.ascher-racing.com/shop/sqr-70mm-adapter/
And yes, having something like that in the box would be nice, and even better to have standard 70mm pattern on motor hub out of the box.
But at least there is a solution, thanks to Martin.
Ok, so apologies but this is a classic case of ‘watch the forkin’ video’, which is I guess the modern version of RTFM.
Thank you Andrew for pointing out Martin’s brilliant adaptor plate, got mine really quickly despite all the current COVID-19 issues.
Initially as I hadn’t watched Barry’s video on fitting 3rd party QRs I just fitted Martin’s adaptor to the wheel side of the Simucube QR (SQR) hub.
This works great, but because of the additional length of the QR hub I wanted to fit, this potentially added unwanted additional stress on the motor shaft bearings.
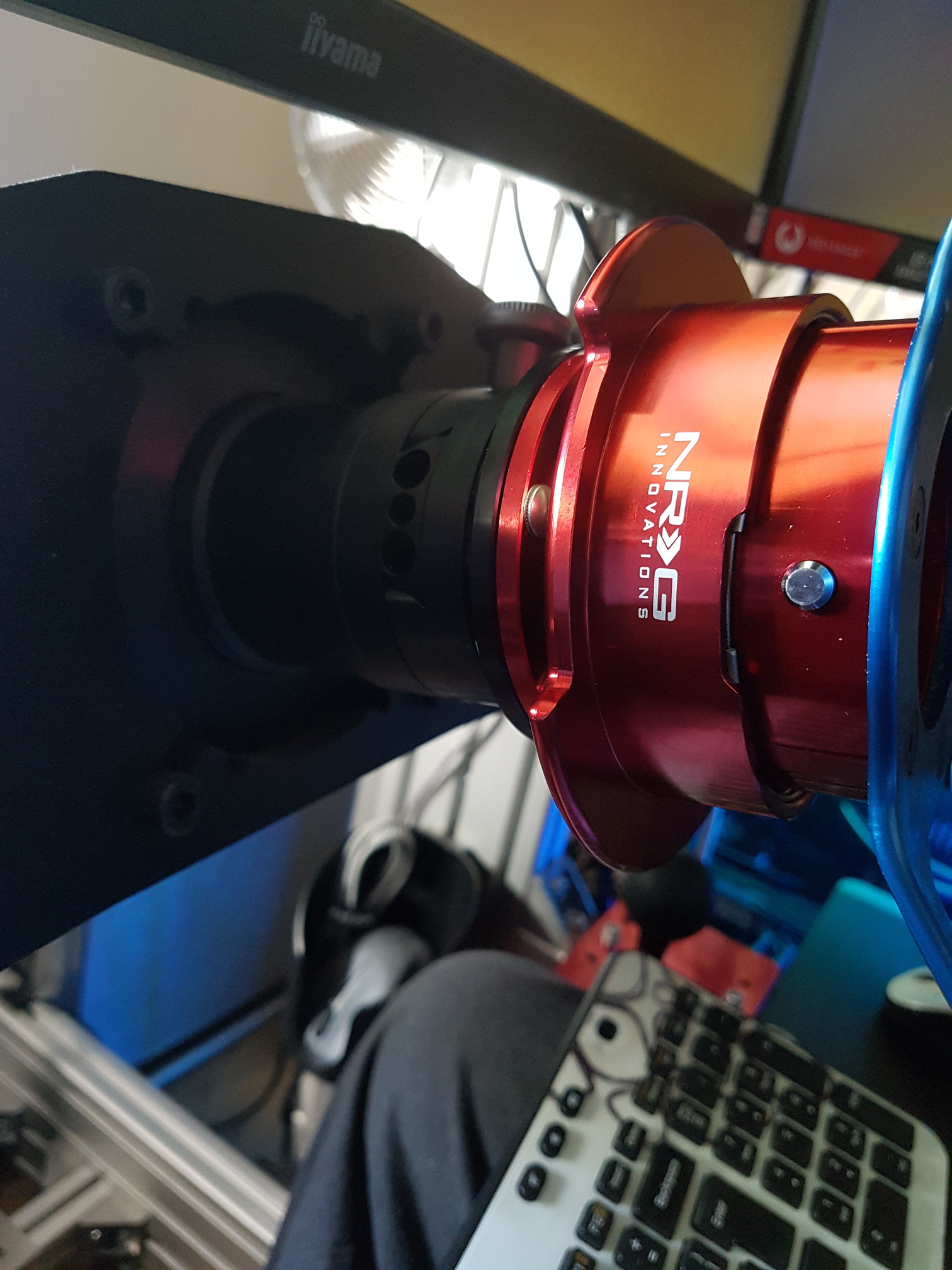
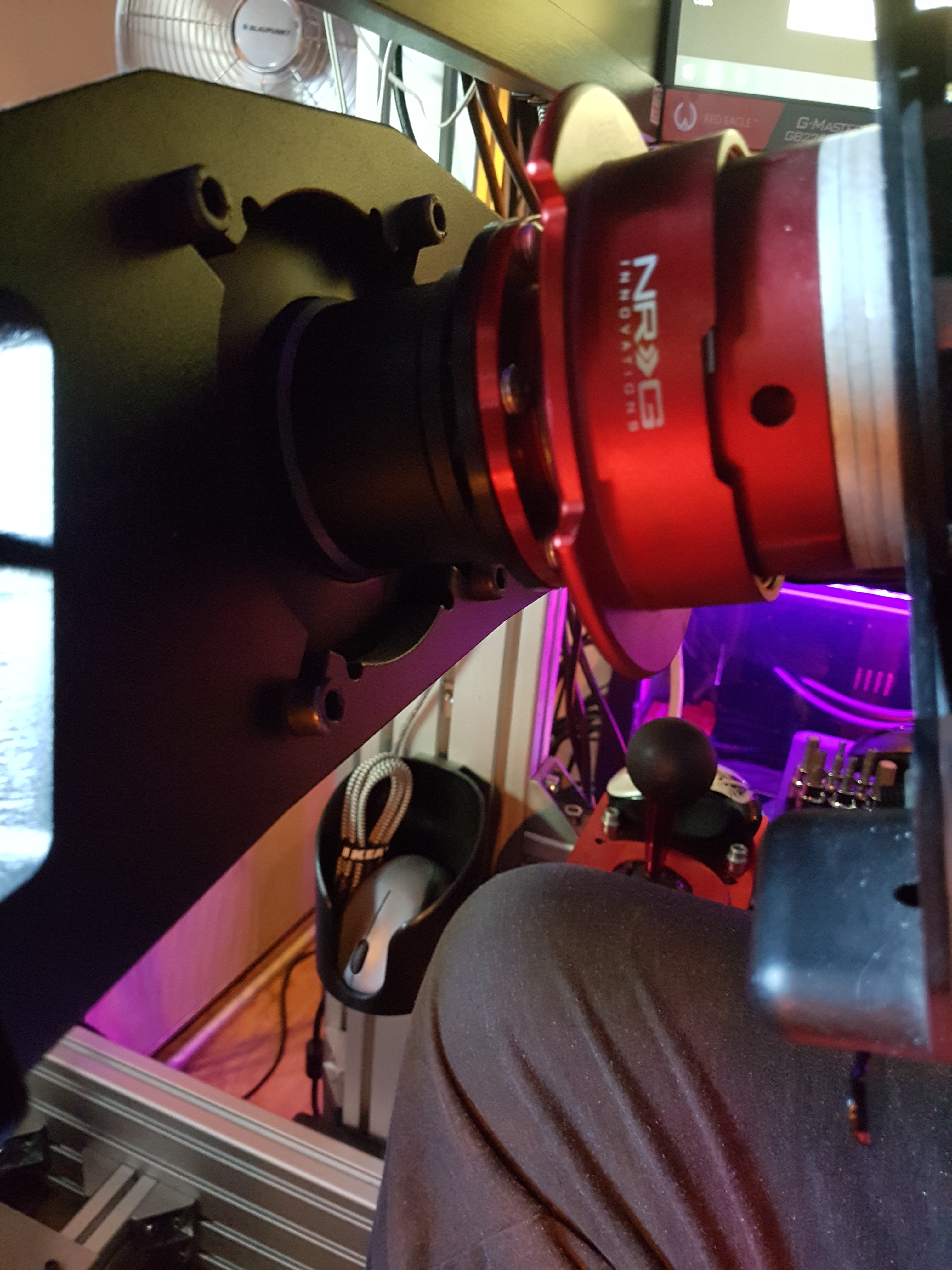
So having then watched Barry’s video, I removed the motor side part of the SQR hub, mounted Martin’s adapter plate directly to the Motor, and the base of the NRG QR hub to that.
This now means that overall the distance from the back of the wheel to the end of the motor shaft is very similar or less than the same distance using only the SQR with the extension.
So thank-you again Andrew for pointing me towards Martin’s adaptor, it works brilliantly. I can use my favoured QR hubs, the wheels off my old ECCI, and future wheels, and do it knowing that I’m not putting additional strain through the motor bearings in the process. That’s what I call a result.
2 Likes