I saw Aki’s post, and decided to post about a project of mine and of Juha Koljonen, although many other people were also involved.
Our University’s space technology hobby club, Castor, had been donated an aluminum extrusion frame, originally configured as a material dispenser in some lab at the university. Around 10 years ago, some previous Castor student members reconfigured it as a CNC milling machine, but the aluminum frame was seen as too flexible for this purpose. However, some titanium parts were more or less succesfully milled back then.
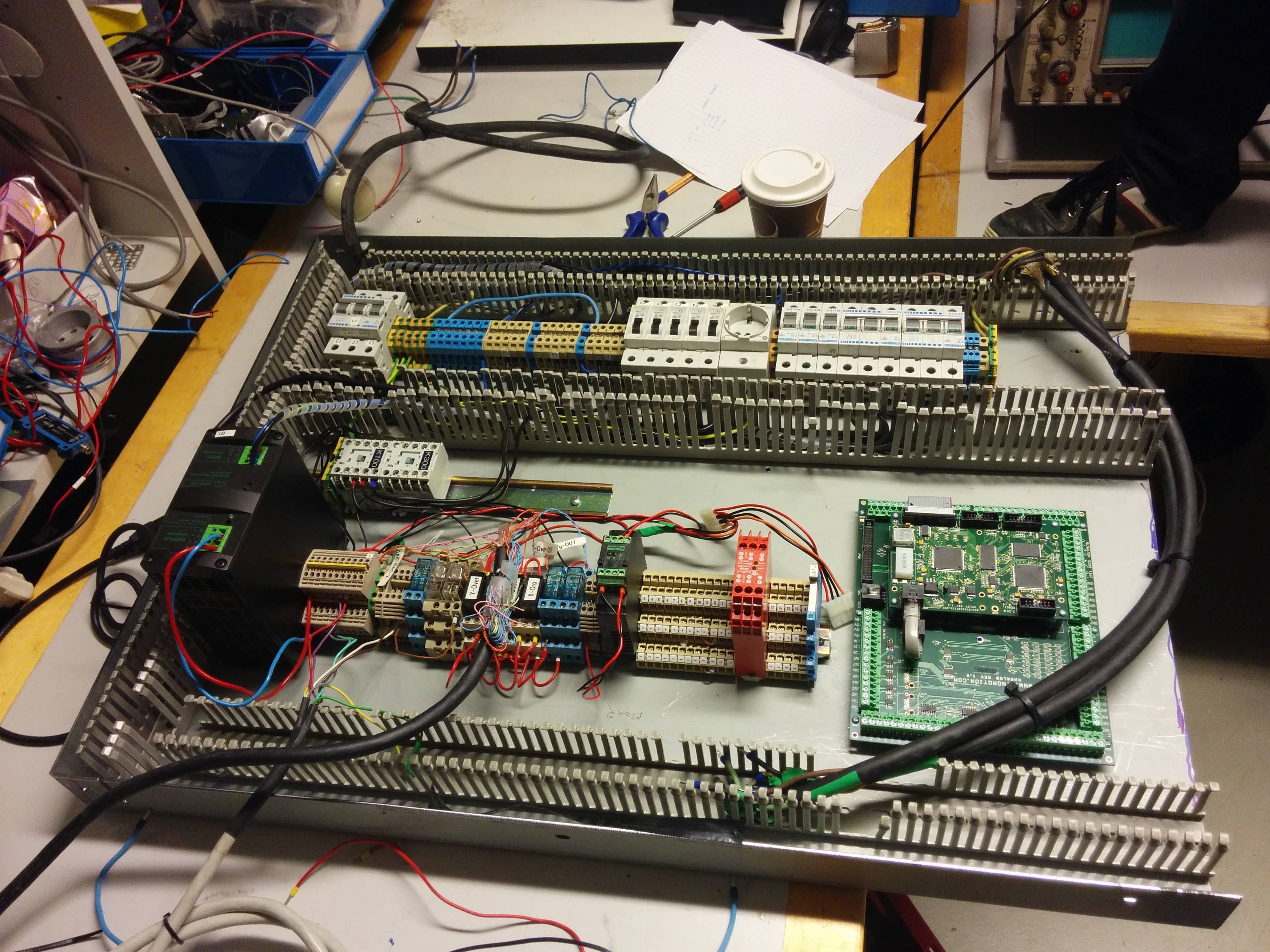
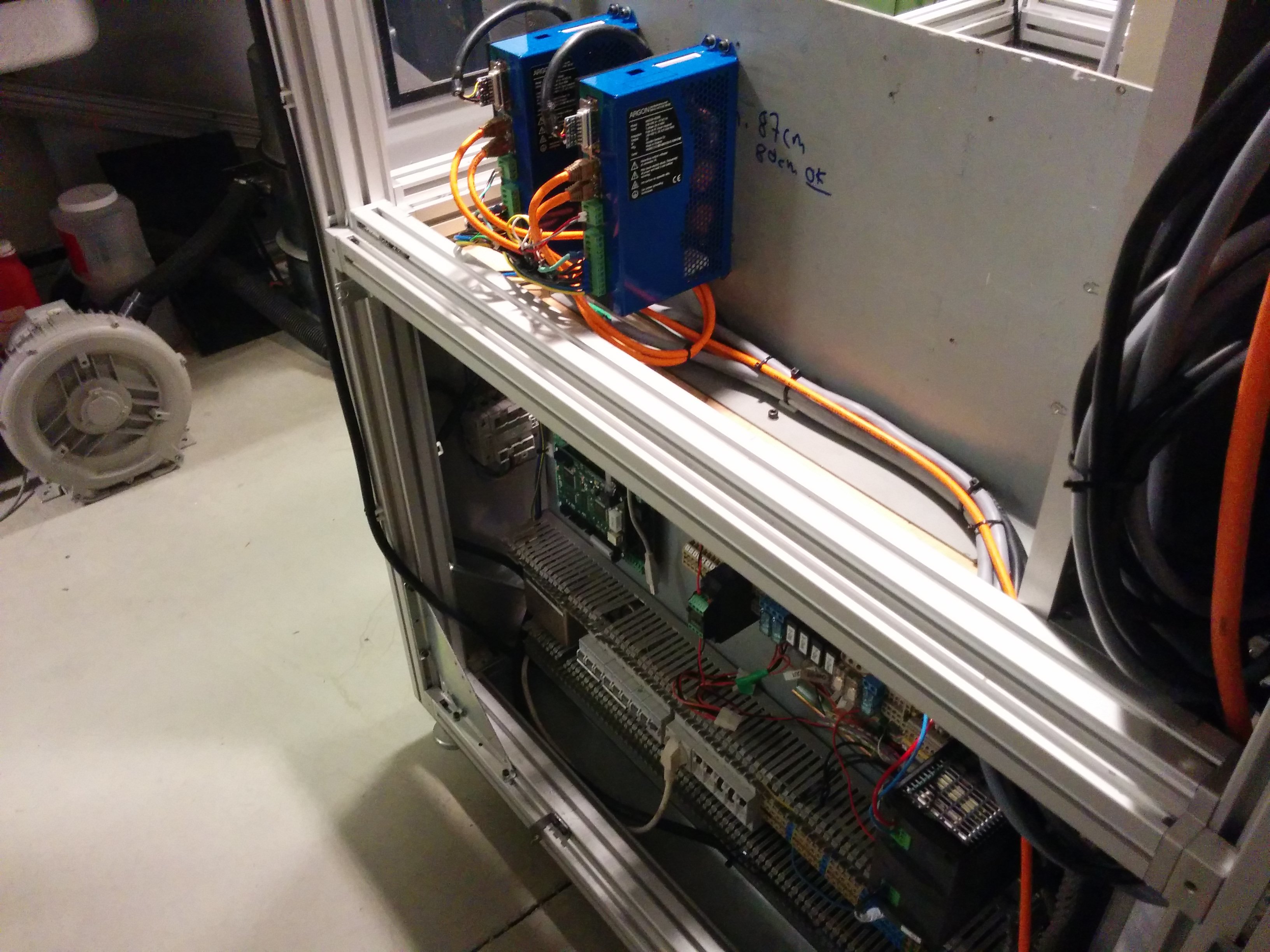
3D printing was seen as a popular thing among the students, so the servoaxis were reconfigured, a material pulling strength testing axis was configured as Z-axis for the printer, and Granite Devices Argon servo drives were installed in place of the original drives. Dynomotion’s kFlop and kAnalog control boards were acquired to handle the motion. The actual buildup of the printer was then realized as a student project in relatively short period of time in the Autumn 2015 and early 2016. The MegaPrinter is now available at the Castor’s clubroom for every member to use.
Parts acquired new:
Argon Servo Drives x2 (Thanks Granite Devices!)
small stepper motor controllers for extrusion and Z axis (M542H for Z, and some smaller one for extrusion axis, and power supplies for these)
Dynomotion KFlop and KAnalog motion control system (Thanks to department of Automation Science and Engineering at Tampere University of Technology)
Extruder, bed heating elements, bed glass, terminal blocks etc…
Thanks to the Student Union for the project sponsorship!
Recycled parts, found over the years from the university’s backyards:
Original X and Y axis: Lenze MDSKSRS056-23 and Lenze MDSKSR3036-23 (both with resolver feedback device)
Z-axis: Zwick Material Testing model 1435 frame, installed upside down.
Stepper motors for Z-axis: MAE HY200-2220-0210-AX08 Stepper Motor x2
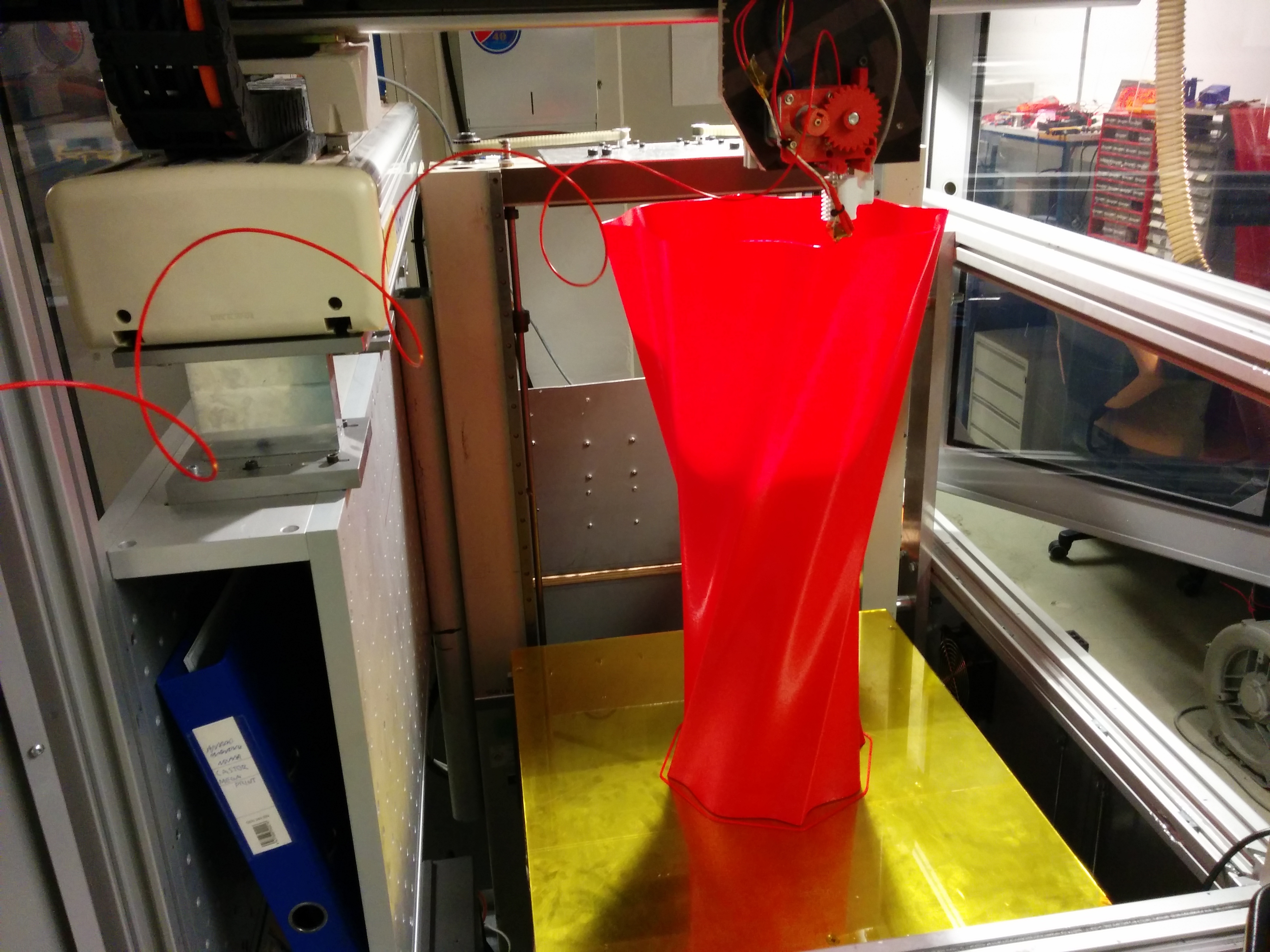
Currently, the printer is configured to print 1.75 mm filaments with 0.8 mm nozzle and 0.5 mm layer thickness, resulting in a very speedy, although somewhat coarse prints. The positioning accuracy has been measured to be in the < 20 um range!
But now the best bit of the printer: Thanks to the roomy frame and the huge Z-axis, the printing area is 500 mm x 500 mm x 1000 mm! This makes the printer capable of very large prints, and ideal for fast prototyping.
I will add many pictures in the post.